Centripetal Catmull – Rom spline - Centripetal Catmull–Rom spline - Wikipedia
İçinde bilgisayar grafikleri, merkezcil Catmull – Rom spline değişken bir şeklidir Catmull-Rom eğri, başlangıçta tarafından formüle edilmiştir Edwin Catmull ve Raphael Rom,[1] Barry ve Goldman tarafından önerilen özyinelemeli bir algoritma kullanılarak değerlendirilebilir.[2] Dört kontrol noktası tarafından tanımlanan enterpolasyonlu bir spline türüdür (kontrol noktalarından geçen bir eğri) , eğri yalnızca -e .




Tanım

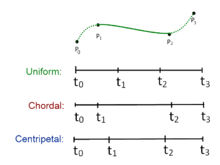
İzin Vermek bir noktayı gösterir. Bir eğri parçası için puanlarla tanımlanmış ve düğüm dizisi merkezcil Catmull – Rom spline şu şekilde üretilebilir:
![{ mathbf {P}} _ {i} = [x_ {i} quad y_ {i}] ^ {T}](https://wikimedia.org/api/rest_v1/media/math/render/svg/94b787f14d85118f4669426adc26edc700fc97e7)



nerede





ve
![t _ {{i + 1}} = sol [{ sqrt {(x _ {{i + 1}} - x_ {i}) ^ {2} + (y _ {{i + 1}} - y_ {i} ) ^ {2}}} sağ] ^ {{ alpha}} + t_ {i}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e3fbc45aa0c46308c07c445d0e1359cafca90a17)
içinde düğüm parametrelendirmesi için 0 ile 1 arasında değişir ve ile . Merkezcil Catmull – Rom spline için değeri dır-dir . Ne zaman ortaya çıkan eğri standarttır tek tip Catmull-Rom spline; ne zaman ürün bir akor Catmull-Rom spline.







Takma spline denklemlerine ve eğri eğrisinin değerinin dır-dir . Benzer şekilde, ikame spline denklemleri, -de . Bu, değerinden bağımsız olarak doğrudur beri denklem değerini hesaplamak için gerekli değildir noktalarda ve .









3D noktalara genişletme, basitçe dikkate alınarak elde edilir genel bir 3B nokta ve
![{ displaystyle mathbf {P} _ {i} = [x_ {i} quad y_ {i} quad z_ {i}] ^ {T}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/34f8d209346f24c717009326402cc571a17b77b4)

![{ displaystyle t_ {i + 1} = sol [{ sqrt {(x_ {i + 1} -x_ {i}) ^ {2} + (y_ {i + 1} -y_ {i}) ^ { 2} + (z_ {i + 1} -z_ {i}) ^ {2}}} sağ] ^ { alpha} + t_ {i}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4324aa06aa4fecb4a093c1fc499d931ecee8040f)
Avantajlar
Centripetal Catmull-Rom spline, orijinal ve diğer Catmull-Rom formülasyonu türlerine kıyasla arzu edilen birkaç matematiksel özelliğe sahiptir.[3] İlk olarak, bir eğri parçası içinde döngü veya kendi kendine kesişme oluşturmayacaktır. İkinci, sivri uç asla bir eğri parçası içinde meydana gelmez. Üçüncüsü, kontrol noktalarını daha sıkı takip eder.[belirsiz ]

Diğer kullanımlar
İçinde Bilgisayar görüşü Merkezcil Catmull-Rom spline, segmentasyon için aktif bir model formüle etmek için kullanılmıştır. Yöntem olarak adlandırılır aktif eğri modeli.[4] Model temel alınarak tasarlanmıştır aktif şekil modeli, ancak iki ardışık noktayı birleştirmek için merkezcil Catmull-Rom spline kullanır (aktif şekil modeli basit düz çizgi kullanır), böylece bir şekli göstermek için gereken toplam nokta sayısı daha az olur. Merkezcil Catmull-Rom spline kullanımı, bir şekil modelinin eğitimini çok daha basit hale getirir ve bölümlemeden sonra bir konturu düzenlemenin daha iyi bir yolunu sağlar.
Python'da kod örneği
Aşağıdaki, Catmull – Rom eğrisinin bir uygulamasıdır. Python bu, aşağıda gösterilen arsayı üretir.
ithalat diziithalat matplotlib.pyplot gibi pltdef CatmullRomSpline(P0, P1, P2, P3, nPuanlar=100): """ P0, P1, P2 ve P3, Catmull-Rom eğrisini tanımlayan (x, y) nokta çiftleri olmalıdır. nPuanlar, bu eğri segmentine dahil edilecek nokta sayısıdır. """ # Dizi çarpımını yapabilmemiz için noktaları numpy'ye çevirin P0, P1, P2, P3 = harita(dizi.dizi, [P0, P1, P2, P3]) # Parametrik sabit: merkezcil eğri için 0,5, tek biçimli eğri için 0,0, kordal eğri için 1,0. alfa = 0.5 # Aşağıdaki tj () işlevi için önceden çarpılmış güç sabiti. alfa = alfa/2 def tj(ti, Pi, Pj): xi, yi = Pi xj, yj = Pj dönüş ((xj-xi)**2 + (yj-yi)**2)**alfa + ti # T0 ile t4'ü hesaplayın t0 = 0 t1 = tj(t0, P0, P1) t2 = tj(t1, P1, P2) t3 = tj(t2, P2, P3) # Yalnızca P1 ve P2 arasındaki noktaları hesaplayın t = dizi.boşluk(t1, t2, nPuanlar) # P0 - P3 noktaları ile çarpabilmemiz için yeniden şekillendirin # ve her t değeri için bir puan alın. t = t.yeniden şekillendirmek(len(t), 1) Yazdır(t) A1 = (t1-t)/(t1-t0)*P0 + (t-t0)/(t1-t0)*P1 A2 = (t2-t)/(t2-t1)*P1 + (t-t1)/(t2-t1)*P2 A3 = (t3-t)/(t3-t2)*P2 + (t-t2)/(t3-t2)*P3 Yazdır(A1) Yazdır(A2) Yazdır(A3) B1 = (t2-t)/(t2-t0)*A1 + (t-t0)/(t2-t0)*A2 B2 = (t3-t)/(t3-t1)*A2 + (t-t1)/(t3-t1)*A3 C = (t2-t)/(t2-t1)*B1 + (t-t1)/(t2-t1)*B2 dönüş Cdef CatmullRomChain(P): """ Bir nokta zinciri için Catmull – Rom'u hesaplayın ve birleşik eğriyi döndürün. """ sz = len(P) # C eğrisi (x, y) noktalarından oluşan bir dizi içerecektir. C = [] için ben içinde Aralık(sz-3): c = CatmullRomSpline(P[ben], P[ben+1], P[ben+2], P[ben+3]) C.uzatmak(c) dönüş C# Eğrinin geçmesi için bir dizi nokta tanımlayınPuanlar = [[0, 1.5], [2, 2], [3, 1], [4, 0.5], [5, 1], [6, 2], [7, 3]]# Noktalar üzerinden Catmull-Rom eğrilerini hesaplayınc = CatmullRomChain(Puanlar)# Catmull-Rom eğri noktalarını x ve y dizilerine ve grafiğe dönüştürünx, y = zip(*c)plt.arsa(x, y)# Kontrol noktalarını işaretleyinpks, py = zip(*Puanlar)plt.arsa(pks, py, 'veya')plt.göstermek()
Unity C # kod örneği
kullanma UnityEngine;kullanma System.Collections;kullanma System.Collections.Generic;halka açık sınıf Catmul : MonoBehaviour { // 3D alanda GameObjects dönüşümlerini puanlarınız olarak kullanın veya istediğiniz noktalarla dizi tanımlayın halka açık Dönüştürme[] puan; // Noktaları Catmull eğrisinde saklayın, böylece onları görselleştirebiliriz Liste<Vektör2> newPoints = yeni Liste<Vektör2>(); // Eğride kaç nokta istiyorsunuz uint puan sayısı = 10; // Parametrik sabit: Tekdüze eğri için 0,0, merkezcil eğri için 0,5, kordal eğri için 1,0 halka açık yüzer alfa = 0.5f; ///////////////////////////// geçersiz Güncelleme() { CatmulRom(); } geçersiz CatmulRom() { newPoints.Açık(); Vektör2 s0 = puan[0].durum; // Vector3, Vector2'ye örtük bir dönüşüme sahiptir Vektör2 s1 = puan[1].durum; Vektör2 s2 = puan[2].durum; Vektör2 s3 = puan[3].durum; yüzer t0 = 0.0f; yüzer t1 = GetT(t0, s0, s1); yüzer t2 = GetT(t1, s1, s2); yüzer t3 = GetT(t2, s2, s3); için (yüzer t=t1; t<t2; t+=((t2-t1)/(yüzer)puan sayısı)) { Vektör2 A1 = (t1-t)/(t1-t0)*s0 + (t-t0)/(t1-t0)*s1; Vektör2 A2 = (t2-t)/(t2-t1)*s1 + (t-t1)/(t2-t1)*s2; Vektör2 A3 = (t3-t)/(t3-t2)*s2 + (t-t2)/(t3-t2)*s3; Vektör2 B1 = (t2-t)/(t2-t0)*A1 + (t-t0)/(t2-t0)*A2; Vektör2 B2 = (t3-t)/(t3-t1)*A2 + (t-t1)/(t3-t1)*A3; Vektör2 C = (t2-t)/(t2-t1)*B1 + (t-t1)/(t2-t1)*B2; newPoints.Ekle(C); } } yüzer GetT(yüzer t, Vektör2 s0, Vektör2 s1) { yüzer a = Mathf.Pow((s1.x-s0.x), 2.0f) + Mathf.Pow((s1.y-s0.y), 2.0f); yüzer b = Mathf.Pow(a, alfa * 0.5f); dönüş (b + t); } // Noktaları görselleştirin geçersiz OnDrawGizmos() { Gizmos.renk = Renk.kırmızı; her biri için (Vektör2 temp içinde newPoints) { Vektör3 poz = yeni Vektör3(temp.x, temp.y, 0); Gizmos.DrawSphere(poz, 0.3f); } }}3D uzayda bir uygulama için, Vector2'yi Vector3 noktalarına dönüştürdükten sonra, GetT fonksiyonunun ilk satırı şu şekilde değiştirilmelidir: Mathf.Pow ((p1.x-p0.x), 2.0f) + Mathf.Pow ((p1.y-p0.y), 2.0f) + Mathf.Pow ((p1.z-p0.z), 2.0f);
Unreal C ++ 'da kod örneği
yüzer GetT( yüzer t, yüzer alfa, sabit FVector& s0, sabit FVector& s1 ){ Oto d = s1 - s0; yüzer a = d | d; // Nokta ürün yüzer b = FMath::Pow( a, alfa*.5f ); dönüş (b + t);}FVector CatMullRom( sabit FVector& s0, sabit FVector& s1, sabit FVector& s2, sabit FVector& s3, yüzer t / * 0 ile 1 arasında * /, yüzer alfa=.5f / * 0 ile 1 arasında * / ){ yüzer t0 = 0.0f; yüzer t1 = GetT( t0, alfa, s0, s1 ); yüzer t2 = GetT( t1, alfa, s1, s2 ); yüzer t3 = GetT( t2, alfa, s2, s3 ); t = FMath::Lerp( t1, t2, t ); FVector A1 = ( t1-t )/( t1-t0 )*s0 + ( t-t0 )/( t1-t0 )*s1; FVector A2 = ( t2-t )/( t2-t1 )*s1 + ( t-t1 )/( t2-t1 )*s2; FVector A3 = ( t3-t )/( t3-t2 )*s2 + ( t-t2 )/( t3-t2 )*s3; FVector B1 = ( t2-t )/( t2-t0 )*A1 + ( t-t0 )/( t2-t0 )*A2; FVector B2 = ( t3-t )/( t3-t1 )*A2 + ( t-t1 )/( t3-t1 )*A3; FVector C = ( t2-t )/( t2-t1 )*B1 + ( t-t1 )/( t2-t1 )*B2; dönüş C;}Ayrıca bakınız
Referanslar
- ^ Catmull, Edwin; Rom, Raphael (1974). "Yerel enterpolasyonlu eğrilerin bir sınıfı". Barnhill'de, Robert E .; Riesenfeld, Richard F. (editörler). Bilgisayar Destekli Geometrik Tasarım. sayfa 317–326. doi:10.1016 / B978-0-12-079050-0.50020-5. ISBN 978-0-12-079050-0.
- ^ Barry, Phillip J .; Goldman, Ronald N. (Ağustos 1988). Catmull – Rom eğrilerinin bir sınıfı için yinelemeli bir değerlendirme algoritması. 15.Yıllık Bilgisayar Grafiği ve Etkileşimli Teknikler Konferansı Bildirileri, SIGGRAPH 1988. 22. Bilgi İşlem Makineleri Derneği. s. 199–204. doi:10.1145/378456.378511.
- ^ Yüksel, Cem; Schaefer, Scott; Keyser, John (Temmuz 2011). "Catmull-Rom eğrilerinin parametrelendirilmesi ve uygulamaları". Bilgisayar destekli tasarım. 43 (7): 747–755. CiteSeerX 10.1.1.359.9148. doi:10.1016 / j.cad.2010.08.008.
- ^ Jen Hong, Tan; Acharya, U. Rajendra (2014). "Aktif eğri modeli: Bir şekle dayalı model etkileşimli segmentasyon" (PDF). Dijital Sinyal İşleme. 35: 64–74. arXiv:1402.6387. doi:10.1016 / j.dsp.2014.09.002. S2CID 6953844.
Dış bağlantılar
- Çıkıntı ve kendi kendine kesişme olmadan Catmull-Rom eğrisi - Java'da uygulama
- Çıkıntı ve kendi kendine kesişme içermeyen Catmull-Rom eğrisi - C ++ 'da basitleştirilmiş uygulama
- Catmull-Rom eğrileri - Jupyter not defterinde Python aracılığıyla etkileşimli nesil