Motor dengesi - Engine balance
Motor dengesi kuvvetlerin (yanma veya dönen / ileri geri hareket eden bileşenlerden kaynaklanan) bir İçten yanmalı motor veya buhar makinesi. En sık kullanılan terimler birincil denge ve ikincil denge. Motorun içindeki dengesiz kuvvetler titreşimlere neden olabilir.
Dengesizliğin nedenleri


Motor içindeki bazı bileşenlerin (bağlantı çubukları gibi) karmaşık hareketlere sahip olmasına rağmen, tüm hareketler, dengesizliklerin analizine yardımcı olan ileri geri ve dönen bileşenlere ayrılabilir.
Sıralı bir motor örneğini kullanarak (pistonların dikey olduğu yerde), ana ileri geri hareketler şunlardır:
- Yukarı / aşağı hareket eden pistonlar
- Yukarı / aşağı hareket eden bağlantı çubukları
- Krank mili etrafında dönerken sağa / sola hareket eden biyel kolları, ancak bu hareketlerin neden olduğu yanal titreşimler, pistonların neden olduğu yukarı-aşağı titreşimlerden çok daha küçüktür.[1]
Dengesizliğe neden olabilecek ana dönme hareketleri şunlardır:
- Krank mili
- Eksantrik milleri
- Bağlantı çubukları (piston ve krank atışı arasında değişen yatay sapmanın gerektirdiği şekilde piston ucunun etrafında dönen)
Dengesizliklere, aşağıdaki bölümlerde ayrıntıları verildiği üzere, tek tek bileşenlerin statik kütlesi veya motorun silindir yerleşimi neden olabilir.
Statik kütle
Hareketli parçaların ağırlığı veya ağırlık dağılımı tek tip değilse, hareketleri dengesiz kuvvetlere neden olarak titreşime yol açabilir. Örneğin, pistonların veya bağlantı çubuklarının ağırlıkları silindirler arasında farklıysa, karşılıklı hareket dikey kuvvetlere neden olabilir. Benzer şekilde, düzensiz ağ ağırlıklarına sahip bir krank milinin veya eşit olmayan ağırlık dağılımına sahip bir volanın dönüşü, dönen dengesizlik.
Silindir düzeni
Statik kütlelerin mükemmel dengelenmiş ağırlık dağılımında bile, bazı silindir düzenleri her silindirden gelen kuvvetlerin birbirini her zaman iptal etmemesi nedeniyle dengesizliğe neden olur. Örneğin, sıralı dört motorun dikey bir titreşimi vardır (motor hızının iki katı). Bu dengesizlikler tasarımın doğasında mevcuttur ve önlenemez, bu nedenle ortaya çıkan titreşim kullanılarak yönetilmesi gerekir. denge milleri veya diğeri NVH - Kabine giren titreşimi en aza indirmek için azaltma teknikleri.
Dengesizlik türleri
Pistonlu dengesizlik
Karşılıklı bir dengesizlik, bir bileşenin (bir piston gibi) doğrusal hareketi, aynı düzlemde ters yönde hareket eden eşit momentumla hareket eden başka bir bileşen tarafından iptal edilmediğinde ortaya çıkar.
Türleri karşılıklı faz dengesizliği şunlardır:
- Tek silindirli motor veya sıralı üç motor gibi karşı hareket eden pistonlarda uyumsuzluk.
- Eşit olmayan aralıklı ateşleme sırası ofset olmayan bir V6 motorunda olduğu gibi krank pimleri
Türleri karşılıklı düzlem dengesizliği şunlardır:
- Krank pimleri arasındaki ofset mesafesi, sallanan çift boksör ikiz motor, 120 ° sıralı üç motor, 90 ° V4 motor, sıralı beş motor, 60 ° V6 motor ve çapraz düzlem 90 ° V8 gibi eşit ve zıt yanma kuvvetlerinden krank mili üzerinde motor.
Üst üste binen güç strokları olmayan motorlarda (dört veya daha az silindirli motorlar gibi), güç dağıtımındaki titreşimler, pistonlu bir dengesizliğe benzer şekilde motoru X ekseninde ileri geri döner şekilde titreştirir.
Dönen dengesizlik
Dönen bir dengesizlik, dönen düzeneklerdeki eşit olmayan kütle dağılımlarından kaynaklanır
Türleri dönen faz dengesizliği şunlardır:
- Dengesiz bir volan gibi dönen bir bileşen üzerindeki dengesiz eksantrik kütleler
Türleri dönen düzlem dengesizliği şunlardır:
- Dönen bir düzeneğin dönme ekseni boyunca dengesiz kütleler sallanan bir çifte neden olur, örneğin bir boksör ikiz motorun krank mili karşı ağırlıkları içermiyorsa, 180 ° aralıklı krank atışlarının kütlesi, eksen boyunca bir çifte neden olur. krank mili.[2]
- Bir çift piston / biyel tertibatındaki kütle merkezi yükseklik farkı gibi ters yönde hareket eden grup çiftlerinde yanal hareket. Bu durumda, sallanan bir çifte, bir biyel kolu sola sallanırken (krank dönüşünün üst yarısı sırasında) diğeri sağa sallanırken (alt yarıda) motorun üstünde sola doğru bir kuvvetle sonuçlanır. ve motorun altında sağa doğru bir kuvvet.
Burulma dengesizliği

Burulma titreşimi şaft boyunca ofset mesafelerinde tork uygulandığında ortaya çıkar.
Bu, bir krank milinin ekseni boyunca meydana gelir, çünkü biyel kolları genellikle direnç torkundan (örneğin, kavrama) farklı mesafelerde bulunur. Bu titreşim motorun dışına aktarılmaz, ancak titreşimden kaynaklanan yorgunluk krank mili arızasına neden olabilir.
Radyal motorlar burulma dengesizliği yaşamayın.
Birincil bakiye
Bir motorun birincil dengesi, o sırada meydana gelen titreşimleri ifade eder. temel frekans (birinci harmonik) motor devrinin.[3] Bu titreşimler bu nedenle krank mili hızına (motorun "devri") eşit bir frekansta meydana gelir. Yukarı doğru hareket eden her bir pistonun ataleti aşağı doğru hareket eden başka bir piston tarafından iptal edilmediğinden, tek sayıda silindire sahip (karşı ağırlıksız) bir motorda birincil dikey dengesizlik mevcut olabilir.
Dört zamanlı bir motorda, her bir silindir, krank milinin her iki dönüşünde bir güç strokuna sahiptir ve bu, krank mili hızının yarısında titreşimlere (yanma ve sıkıştırma kuvvetleri nedeniyle) neden olabilir. Bu titreşimler bazen "yarım derece" titreşimler olarak adlandırılır.[4][5] Alternatif olarak, bazen tüm sinüzoidal olmayan titreşimler şu şekilde anılır: ikincil titreşimler ve kalan tüm titreşimler (frekanstan bağımsız olarak) olarak adlandırılır birincil titreşimler.[kaynak belirtilmeli ]
İkincil denge
Dengesizliğin nedeni
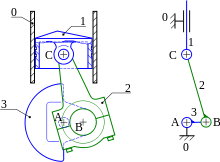
1: Piston (mavi)
2: Biyel (yeşil)
3: Krank mili (mavi)
Bir piston, hareketinin üst yarısında, hareketinin alt yarısında olduğundan daha fazla hareket eder, bu da sinüzoidal olmayan titreşimlerle sonuçlanır. ikincil titreşim.
Kat edilen mesafedeki fark, bağlantı çubuğunun dönüşünden kaynaklanmaktadır. 90 derece sonra üst ölü merkez (TDC) biyel kolunun krank mili ucu tam olarak strokunun orta noktasındadır, ancak biyel açısı (yani krank milinden aşağı bakarken sol-sağ hareket) biyel kolunun piston ucunun daha alçak olması gerektiği anlamına gelir biyelin sabit bir uzunluğu muhafaza etmesi için orta noktadan daha fazla. Aynısı, TDC'den sonra 270 derece için de geçerlidir, bu nedenle piston ucu, TDC'den sonra, krank mili dönüş döngüsünün 'alt yarısında' (TDC'den 90 derece ila 270 derece) daha büyük bir mesafe kat eder. Bu daha uzun mesafeyi aynı sürede kat etmek için, bağlantı çubuğunun piston ucu, hareketinin üst yarısında alt yarısına göre daha yüksek hızlanma oranlarına maruz kalmalıdır.
Bu eşit olmayan hızlanma, krank milinin üst yarısında, alt yarısında olduğundan daha yüksek atalet kuvveti yaratır (hızlanma ve yavaşlama). Sıralı dört motor durumunda (geleneksel 180 derecelik krank miline sahip), silindir 1 ve 4'ün yukarı doğru ataleti, silindir 2 ve 3'ün aşağı doğru ataletinden daha büyüktür. Bu nedenle, eşit sayıda ters yönde hareket eden silindir olmasına rağmen herhangi bir zamanda yol tarifi (mükemmel birincil denge), motor yine desinüzoidal dengesizlik. Buna bir ikincil dengesizlik.
Matematiksel olarak, krank-kaydırıcı mekanizmasının sinüzoidal olmayan hareketi, iki sinüzoidal hareketin bir kombinasyonu olarak temsil edilebilir:
- a birincil bileşen krank dönüşüne eşit frekansta (sonsuz uzunlukta biyel ile piston hareketine eşdeğer)
- a ikincil bileşen iki kat frekansta meydana gelen[6] ve biyel kolu eğme açısının etkisine eşdeğerdir, bu da dik olduğu zaman küçük uç konumunu düşürür
Pistonlar tam olarak bu şekilde hareket etmez, yine de hareketini analiz etmek için yararlı bir temsildir. Bu analiz aynı zamanda terimlerin de kaynağıdır birincil denge ve ikincil dengeartık akademi dışında da motor özelliklerini tanımlamak için kullanılıyor.
Etkiler ve azaltma önlemleri

Bu ikincil dengesizliğin neden olduğu titreşim, düşük motor hızlarında nispeten küçüktür, ancak motor hızının karesiyle orantılıdır ve potansiyel olarak yüksek RPM'de aşırı titreşime neden olur. Bu titreşimleri azaltmak için bazı motorlar denge milleri kullanır. Bir denge mili sistem genellikle her bir şaft üzerinde aynı eksantrik ağırlığa sahip iki şafttan oluşur. Şaftlar, motor hızının iki katı hızda ve birbirine zıt yönlerde dönerek, motorun ikincil dengesizliğinin neden olduğu kuvveti ortadan kaldırmak için tasarlanmış dikey bir kuvvet üretir. Denge şaftlarının en yaygın kullanımı V6 motorlar ve büyük deplasmanlı sıralı dört motorlardır.
Piston çiftlerinin birbiriyle senkronize hareket ettiği bir motorda (örneğin sıralı-dört, sıralı-altı ve 90 ° düz düzlemli V8 motorlar), ikincil dengesizlik kuvvetleri iki kat daha büyük ve tüm motorların yarısı kadar sıktır. pistonlar birbirleriyle faz dışıdır (örneğin, sıralı üç ve çapraz V8 motorları).
Silindir düzeninin etkisi
Birden fazla silindire sahip motorlar için, her sıradaki piston sayısı, V açısı ve ateşleme aralığı gibi faktörler genellikle ileri geri faz dengesizliklerinin veya burulma dengesizliklerinin olup olmadığını belirler.
Düz motorlar
Düz ikiz motorlar en yaygın olarak aşağıdaki yapılandırmaları kullanın:
- 360 ° krank mili - bu konfigürasyon en yüksek ikincil dengesizlik seviyelerini yaratır,[7] bununla birlikte, birincil düzlem dengesizlikleri en aza indirilir ve eşit ateşleme sırası daha yumuşak güç dağıtımı sağlar (dörtten fazla silindire sahip motorlarda üst üste binen güç vuruşları olmasa da)
- 180 ° krank mili - bu konfigürasyon, birincil düzlem dengesizlikleri ve düzensiz bir ateşleme sırası üretir,[8] ancak ikincil dengesizlikler, 360 ° düz ikiz motora kıyasla yarısı kadar güçlüdür (ve frekansta iki kat).
- 270 ° krank mili - bu konfigürasyonlar ikincil dengesizlikleri en aza indirir, ancak birincil döner düzlem dengesizliği mevcuttur ve ateşleme sırası düzensizdir. Egzoz notu ve güç dağıtımı, 90 ° V-ikiz motora benziyor.
Düz üç motorlar en yaygın olarak 120 ° krank mili kullanır ve aşağıdaki özelliklere sahiptir:
- Eşit aralıklı bir ateşleme aralığı (güç vuruşları üst üste binmemesine rağmen).
- Birincil pistonlu düzlem ve dönen düzlem dengesizlikleri. Bunlar, krank mili üzerindeki karşı ağırlıklar kullanılarak azaltılabilir.
- İkincil dengesizlik kuvvetleri, iki silindir birbiriyle senkronize hareket etmediğinden, sıralı dört motordakinden daha küçüktür. Bu, biyel kollarının daha kısa olabileceği ve daha kompakt bir motora izin verebileceği anlamına gelir. Basit bir üçü bir arada egzoz manifoldu tekdüze sağlar süpürme ayrıca kompakt bir motor boyutuna izin verir.
Düz dört motorlar ("sıralı dört motor" olarak da adlandırılır) tipik olarak "yukarı-aşağı-yukarı" 180 ° krank mili tasarımı kullanır ve aşağıdaki özelliklere sahiptir:
- Eşit aralıklı bir ateşleme aralığı (güç vuruşları üst üste binmemesine rağmen).
- Birincil ileri geri hareket eden düzlem ve dönen düzlem dengesizlikleri mevcuttur.
- Her zaman senkronize hareket eden iki piston nedeniyle ikincil dengesizlik kuvvetleri yüksektir.
- Sola ve sağa sallanan bağlantı çubuklarının ağırlık merkezinin yükseklik dengesizliği, birlikte hareket eden iki bağlantı çubuğu nedeniyle artırıldığından, düşük hızlarda (örneğin rölanti) dönme titreşimleri mevcut olabilir.
- Karşı ağırlıklar, 1930'ların ortalarından beri binek otomobil motorlarında kullanılmaktadır.[9] ya da tam karşı ağırlık veya yarı karşı ağırlık (Ayrıca şöyle bilinir yarı karşı ağırlık) tasarımlar.
Düz beş motorlar tipik olarak 72 ° krank mili kullanır ve aşağıdaki özelliklere sahiptir:
- Üst üste gelen güç vuruşları ile eşit aralıklı bir ateşleme aralığı, daha az silindire sahip motorlara göre daha yumuşak bir rölanti sağlar.
- Birincil pistonlu düzlem ve dönen düzlem dengesizlikleri. Sıralı üç motora göre, bu dengesizlikler krank mili üzerindeki karşı ağırlıkların kullanılmasıyla azaltılabilir.
- İkincil dengesizlik kuvvetleri, iki silindir birbiriyle senkronize hareket etmediğinden, sıralı altılı bir motordakinden daha küçüktür.
Düz altı motorlar tipik olarak 120 ° krank mili, 1-5-3-6-2-4 silindir ateşleme sırası kullanın ve aşağıdaki özelliklere sahip olun:
- Üst üste binen güç vuruşlarıyla eşit aralıklı bir ateşleme aralığı. İki basit üçü bir arada egzoz manifoldu tekdüze süpürme sağlar, çünkü motor bu bağlamda iki ayrı sıralı üç motor gibi etkili bir şekilde davranır.
- Birincil denge mükemmel.
- İkincil dengesizlik daha yüksektir, çünkü iki piston her zaman senkronize hareket eder.
- Burulma dengesizlikleri, motorun daha uzun olması nedeniyle daha yüksek olabilir (sıralı dörtlü bir motora kıyasla), bu nedenle burulma sönümleyici bazı sıralı altı motorlarda kullanılır.
V motorları
V-ikiz motorlar aşağıdaki özelliklere sahiptir:
- 90 derecelik bir V açısı ve ofset krank pimleri ile bir V-ikiz motor mükemmel birincil dengeye sahip olabilir.
- Paylaşılan bir krank pimi kullanılırsa (bir Ducati V-ikiz motorda olduğu gibi), 360 ° krank mili eşit olmayan bir ateşleme aralığına neden olur. Bu motorlar ayrıca birincil ileri geri hareket eden düzleme ve dönen düzlem dengesizliklerine sahiptir. Bağlantı çubuklarının krank mili boyunca farklı konumlarda olduğu yerlerde ( çatal ve bıçak bağlantı çubukları ), bu ofset motor içinde sallanan bir çift oluşturur.
V4 motorları 'V' açısı ve krank mili konfigürasyonları açısından birçok farklı konfigürasyona sahiptir. Bazı örnekler:
- Lancia Fulvia Dar V açısına sahip V4 motorları, V açısına karşılık gelen krank pimi ofsetine sahiptir, bu nedenle ateşleme aralığı, düz dört motorla eşleşir.
- Bazı V4 motorları düzensiz ateşleme aralığına sahiptir ve her tasarımın tüm dengeleme öğeleri açısından ayrı ayrı ele alınması gerekir. Honda RC36 motor 90 derece V açısına ve 180 ° -270 ° -180 ° -90 ° ateşleme aralıklarına sahip 180 ° krank miline sahiptir, bu da 360 derece içinde düzensiz ateşleme aralıklarına neden olur ve 720 derece krank mili dönüşü dahilinde. Öte yandan, Honda VFR1200F motor, 76 derece V açısına ve 28 ° sapmaya sahip paylaşımlı krank pimleri ile 360 ° krank miline sahiptir, bu da 256 ° -104 ° -256 ° -104 ° ateşleme aralığı sağlar. Bu motor aynı zamanda, ön-arka-arka-ön olağan bir bağlantı kolu oryantasyonuna sahiptir, ön silindir bankasında arka tarafa göre çok daha geniş bir silindir mesafesi ('delik aralığı') ve bu da daha az sallanan çiftlere (pahasına) neden olur. daha geniş motor genişliği).[10]
V6 motorları genellikle aşağıdaki konfigürasyonlarda üretilir:
- 60 derece V açısı - bu tasarım, kompakt bir motor boyutu sağlar ve kısa krank mili uzunluğu burulma titreşimlerini azaltır. İkincil denge, sıralı altılı bir motordan daha iyidir çünkü birlikte hareket eden bir piston çifti yoktur. Ancak bu tasarım, birincil ileri geri hareket eden düzlem ve dönen düzlem dengesizlikleri ile sonuçlanır. Sol ve sağ silindir sıralarının sendelemesi (biyel kolunun ve krank ağının kalınlığından dolayı) karşılıklı düzlem dengesizliğinin krank mili karşı ağırlıkları kullanılarak azaltılmasını daha zor hale getirir.
- 90 derece V açısı - bu tasarım tarihsel olarak, tasarım ve yapım maliyetlerini düşürmek için 90 derecelik bir V8 motordan iki silindirin kesilmesinden kaynaklanmaktadır. Erken bir örnek, General Motors 90 ° V6 motor, eşit olmayan bir ateşleme aralığına neden olan 18 ° ofset krank miline sahip olan. Gibi daha yeni örnekler Honda C motoru 30 ° ofset krank pimleri kullanın, böylece eşit bir ateşleme aralığı elde edin. 60 derece V açılı V6 motorlara göre, bu motorlarda birincil ileri geri hareket eden düzlem ve dönen düzlem dengesizlikleri, kademeli silindir sıraları ve daha küçük ikincil dengesizlikler vardır.
Düz motorlar

[Kesinlik: 'Düz' bir motor, mutlaka 'boksör' bir motor değildir. 'Düz' bir motor, 180 derece v-motor veya 'boksör' motor olabilir. Ferrari 512BB'de kullanılan 180 derece vee motor, bağlantı çubukları aynı krank atışını kullanan karşılıklı silindir çiftlerine sahiptir. Bunun aksine, BMW motosikletlerinde uygulanan 'boxer' bir motorda, her biyel kolu, karşı silindirin krank atışına 180 derece konumlandırılan kendi krank atışına sahiptir.]
Düz ikiz motorlar tipik olarak 360 ° krank mili, ayrı krank atışları kullanın ve aşağıdaki özelliklere sahip olun:
- Krank mili boyunca pistonlar arasındaki mesafeden dolayı birincil pistonlu düzlem ve dönen düzlem dengesizlikleri.[11] Bu mesafe ve dolayısıyla dengesizlik miktarı, büyük uçlu yatakların, krank ağının ve ana yatağın (ikincisi yalnızca krank atışları arasında yer alıyorsa) kalınlığına bağlıdır. Çatal ve bıçak bağlantı çubuklarına sahip ortak bir krank pimi kullanılırsa birincil dengesizlikler ortadan kaldırılabilir.
- İkincil dengesizlikler minimumdur.
Düz dört motorlar tipik olarak bir sol-sağ-sağ-sol krank mili konfigürasyonu kullanır ve aşağıdaki özelliklere sahiptir:
- Birincil dengesizlikler, karşıt pistonların sallanan çiftlerinin sendelemesinden (önden arkaya kayma) kaynaklanır. Yukarı ve aşağı sallanan biyel çiftleri farklı ağırlık merkezi yüksekliklerinde hareket ettiğinden, bu sallanan çiftin yoğunluğu düz dört motordan daha azdır.
- İkincil dengesizlikler minimumdur.
Düz altı motorlar tipik olarak bir boksör konfigürasyonu kullanır ve aşağıdaki özelliklere sahiptir:
- Üst üste binen güç vuruşlarıyla eşit aralıklı bir ateşleme aralığı. Her bir silindir grubu için basit bir üçe-bir egzoz, tek tip süpürme sağlar, çünkü motor bu bakımdan etkili bir şekilde iki ayrı sıralı üç motor gibi davranır.
- Karşılıklı silindirler arasındaki krank mili boyunca olan mesafeden dolayı birincil pistonlu düzlem ve dönen düzlem dengesizlikleri. Çatal ve bıçak bağlantı çubukları kullanılırsa, düz altılı bir motor mükemmel bir birincil dengeye sahip olur.
- İkincil dengesizlikler minimumdur, çünkü fazda hareket eden silindir çiftleri yoktur ve dengesizlik çoğunlukla karşı silindir tarafından iptal edilir.
- Burulma dengesizlikleri, düz altı motorun daha kısa olması nedeniyle sıralı altı motorlardan daha düşüktür.
Buharlı lokomotifler

Bu bölüm, ikisinin dengelenmesine giriş niteliğindedir. buharlı motorlar bir demiryolu lokomotifine monte edilmiş olarak tahrik tekerlekleri ve akslarla bağlanır.
Bir lokomotifteki dengesiz ataletlerin etkileri, çelik köprülerdeki sapmaların yanı sıra lokomotif hareketlerinin ölçümleri açıklanarak kısaca gösterilmektedir. Bu ölçümler, çeşitli dengeleme yöntemlerinin yanı sıra titreşim genliklerini ve lokomotifin yanı sıra raylar ve köprülerdeki hasarı azaltmak için diğer tasarım özelliklerine olan ihtiyacı göstermektedir. Örnek lokomotif, 2 dış silindire ve valf dişlisine, bağlı tahrik tekerleklerine ve ayrı bir yatağa sahip basit, bileşik olmayan bir tiptir. 3 ve 4 silindirli lokomotifler için dengeleme yöntemleri karmaşık ve çeşitli olabileceğinden, farklı silindir düzenlemelerinin, krank açılarının vb. Etkilerinden söz edilmeden yalnızca temel dengeleme ele alınmaktadır.[12] Matematiksel işlemler 'ileri okumalarda' bulunabilir. Örneğin, Dalby'nin "The Balancing of Engines", dengesiz kuvvetlerin ve poligonların kullanıldığı çiftlerin işlenmesini kapsar. Johnson ve Fry'ın ikisi de cebirsel hesaplamalar kullanıyor.
Hızla, lokomotif ileri-geri hareket etme ve bir yandan diğer yana burun ya da sallanma eğiliminde olacaktır. Ayrıca zıplama ve sallanma eğiliminde olacaktır. Bu makale, dengesiz eylemsizlik kuvvetlerinden ve 2 buhar motorundaki ve bunların bağlı tekerleklerindeki çiftlerden kaynaklanan bu hareketleri incelemektedir (bazı benzer hareketler, iz çalışma yüzeyindeki düzensizlikler ve sertlikten kaynaklanabilir). İlk iki harekete, ileri geri hareket eden kütleler neden olur ve son ikisi, piston çubuklarının eğik hareketinden veya kılavuz çubuklar üzerindeki piston itişinden kaynaklanır.[13]
Dengelemenin yapılabileceği 3 derece vardır. En temel olanı, bir tahrik tekerleği üzerindeki merkez dışı özelliklerin, yani krank pimi ve ona bağlı parçaların statik olarak dengelenmesidir. Ek olarak, ileri geri hareket eden parçaların bir kısmının dengelenmesi ilave döner ağırlık ile yapılabilir. Bu ağırlık, tekerlek üzerindeki merkez dışı parçalar için gerekli olan ağırlık ile birleştirilir ve bu ekstra ağırlık, tekerleğin aşırı dengesiz olmasına neden olarak çekiç darbesi. Son olarak, yukarıdaki denge ağırlıkları tekerleğin düzleminde olduğundan ve dengesizliğin kaynağı düzleminde olmadığından, tekerlek / aks düzeneği dinamik olarak dengelenmez. Buharlı lokomotiflerde dinamik dengeleme, çapraz dengeleme olarak bilinir ve ikinci düzlemin karşı tekerlekte olmasıyla 2 düzlemli dengelemedir.
İstikrarsızlık eğilimi, belirli bir lokomotif sınıfının tasarımına göre değişecektir. İlgili faktörler arasında ağırlığı ve uzunluğu, yaylar ve dengeleyiciler üzerinde desteklenme şekli ve dengesiz bir hareketli kütlenin değerinin yaysız kütle ve lokomotifin toplam kütlesi ile nasıl karşılaştırıldığı yer alır. Teklifin lokomotife bağlanma şekli de davranışını değiştirebilir. Rayın ağırlığı açısından rayın esnekliği ve yol yatağının sertliği lokomotifin titreşim davranışını etkileyebilir.
Kötü insan sürüş kalitesi sağlamanın yanı sıra, kaba sürüş, hem lokomotif hem de ray bileşenlerinde aşınma ve kırılmalar için bakım maliyetlerine neden olur.
Dengesizlik kaynakları

Tüm tahrik tekerlekleri, merkez dışı krank pimleri ve takılı bileşenlerinden kaynaklanan bir dengesizliğe sahiptir. Ana tahrik tekerlekleri, en büyük krank miline ve ana çubuğun dönen kısmına sahip oldukları için en büyük dengesizliğe sahiptir. Ayrıca valf dişlisi eksantrik krankına ve eksantrik çubuğun arka ucuna da sahiptirler. Bağlantılı tahrik tekerleklerinde olduğu gibi, yan çubuk ağırlığının kendi paylarına da sahiptirler. Ana çubuğun bir dönme hareketi atanmış kısmı, başlangıçta her iki ucunda desteklediği tartılarak ölçülmüştür. Dönen ve ileri geri hareket eden parçaları perküsyon merkezinin konumuna göre ayıran daha doğru bir yöntem gerekli hale geldi. Bu pozisyon, çubuğun sarkaç gibi döndürülmesiyle ölçüldü.[14] Kalan tahrik tekerleklerindeki dengesizliğe krank pimi ve yan çubuk ağırlığı neden olur. Her bir krank miline atanan yan çubuk ağırlıkları, çubuğun krank mili olduğu kadar çok ölçekte askıya alınmasıyla veya hesaplama ile ölçülür.
Pistonlu piston / çaprazkafa / ana çubuk / valf hareket bağlantısı dengesizdir ve ileri-geri dalgalanmaya neden olur. 90 derecelik ayrımları, çiftin sallanmasına neden olur.[15]
Dengesizliğin etkilerini ölçmek
Tüm lokomotif, dengesiz eylemsizlik kuvvetlerinin etkisi altında hareket etme eğilimindedir. Dengesiz lokomotiflerin yatay hareketleri, 1850 civarında Fransa'da M. Le Chatelier tarafından bir binanın çatısından halatlara asılarak ölçüldü. 40 mil / saate kadar eşdeğer yol hızlarına kadar çalıştırıldılar ve yatay hareket, tampon kirişe monte edilmiş bir kalemle izlendi. İz, öne ve arkaya sallanma hareketlerinin birleşik hareketiyle oluşturulan eliptik bir şekildi. Şekil, dengesiz lokomotiflerden biri için 5/8 inçlik bir kare içine alınabilir ve dönen ve ileri geri hareket eden kütlelere karşı ağırlıklar eklendiğinde bir noktaya indirgenmiştir.[16]
Dikey dengesizliğin veya değişken tekerlek yükünün ray üzerindeki etkisi, 1895'te ABD'de Profesör Robinson tarafından ölçüldü. Köprü sapmalarını veya gerilmelerini ölçtü ve dengesiz sürücülere statik değer üzerinden% 28'lik bir artış atfetti. .[17]
Lokomotiflerdeki artık dengesizlik, Pennsylvania Demiryolu test tesisinde üç şekilde değerlendirildi. Özellikle, 1904 Louisiana Satın Alma Fuarı'nda 8 lokomotif test edildi. Üç ölçüm şunlardı:
- kritik hız. Bu, dengesiz ileri geri hareket eden parçaların lokomotifin çekişini tersine çevirme hızı olarak tanımlandı. Daha yüksek hızlarda bu hareket ön panellerdeki yağ akışının kısılmasıyla sönümlendi. Kritik hız, bir Baldwin tandem bileşiği için 95 rpm'den bir Cole bileşiği Atlantic için 310 rpm'nin üzerine çıktı.
- pilotta yatay hareket. Örnek olarak, Baldwin bileşiği Atlantic, Cole bileşiği Atlantic için 0.10 "ile karşılaştırıldığında 65 mph'de yaklaşık 0.80" hareket etti.
- tesis destek tekerleklerindeki yükün niteliksel bir değerlendirmesi. Tekerleklerin altından 0.060 "çapında bir tel geçirildi. Deforme olmuş telin ölçülmesi, tekerlek üzerindeki dikey yükün bir göstergesini verdi. Örneğin, bir Cole bileşiği Atlantic, 75 mil / saate kadar tüm hızlar için 0.020" kalınlıktan çok az değişiklik gösterdi. Aksine, 75 mph hızda bir Baldwin bileşiği Atlantic, 0,020 "lik darbesiz darbe deformasyonuna kadar hızlı bir geri dönüş etkisiyle 30 derece tekerlek dönüşü için tekerleğin tamamen kalktığını gösteren hiçbir deformasyon göstermedi.[18]
Kabindeki sürüş kaliteleri açısından bir yolculukta kalitatif değerlendirmeler yapılabilir. Sıkışmış takozlar, tıkalı dengeleyiciler ve motor ile lastik arasında gevşeklik gibi ilgisiz faktörler kaba sürüşe neden olabileceğinden, daha iyi bir denge gerekliliğinin güvenilir bir göstergesi olmayabilir. Ayrıca, dengesiz bir aksın lokomotif ağırlık merkezine göre konumu, kabindeki hareketin kapsamını belirleyebilir. A. H. Fetters, 4-8-2'de, cg altındaki 26.000 lb dinamik artırmanın etkilerinin kabinde görünmediğini, ancak başka herhangi bir aksta aynı artışın olacağını söyledi.[19]
Tekerleklerin statik balansı
Denge ağırlıkları, dengenin bozulmasına neden olan parçaların karşısına yerleştirilir. Bu ağırlıklar için mevcut olan tek düzlem tekerleğin kendisindedir ve bu da tekerlek / aks tertibatında dengesiz bir çiftle sonuçlanır. Tekerlek yalnızca statik olarak dengelenmiştir.
Pistonlu ağırlığın statik dengelenmesi
Pistonlu ağırlığın bir oranı, tekerleğe ekstra bir döner ağırlık eklenerek dengelenir, yani hala sadece statik olarak dengelenir. Dengesizlik, çekiç darbesi veya dinamik büyütme olarak bilinen şeye neden olur, her iki terim de aşağıdaki referanslarda verilenle aynı tanıma sahiptir. Çekiç darbesi, statik ortalamaya göre değişir, dönüşümlü olarak her tekerlek devrinde buna eklenir ve ondan çıkarılır.[20]Amerika Birleşik Devletleri'nde, bir tasarımcının tekerleklere karşı denge ekleyerek ileri geri hareket eden parçaları dengeleme girişiminin neden olduğu dikey bir kuvvet olan dinamik büyütme olarak bilinir.[21]
Çekiç darbesi terimi, kuvvet sürekli değiştiğinden ve yalnızca tekerleğin bir an için raydan kalktığı aşırı durumlarda meydana gelen şeyi çok iyi tanımlamaz ve geri geldiğinde gerçek bir darbe olur.[22]
Yaklaşık 1923 yılına kadar Amerikan lokomotifleri, dengesiz çiftten gelen devir başına ortalamanın üstünde ve altında ana aks yükünde 20.000 lb'ye kadar varyasyonla statik koşullar için dengelendi.[23] Sert sürüş ve hasar, dengelenecek karşılıklı ağırlığın oranının toplam lokomotif ağırlığının bir oranı olarak veya Franklin tamponu ile tanımlanması dahil olmak üzere dinamik dengeleme için tavsiyelere yol açtı[24] lokomotif artı hassas ağırlık.
Farklı bir tekerlek / ray yükü kaynağı olan piston itme kuvveti, bu terimlerin standart tanımlarında görünmese de bazen yanlış olarak çekiç darbesi veya dinamik büyütme olarak adlandırılır. Ayrıca daha sonra açıklanacağı gibi tekerlek devri başına farklı bir forma sahiptir.
Tahrik tekerleklerine ağırlık eklemeye bir alternatif olarak, lastik, lokomotifin etkili kütlesini ve dingil mesafesini artıracak sıkı bir bağlantı kullanılarak bağlanabilir. Prusya Devlet Demiryolları, karşılıklı dengesi olmayan, ancak sert bir hassas bağlantıya sahip 2 silindirli motorlar üretti.[25] Geç Amerikan lokomotifleri için eşdeğer birleştirme, sürtünme sönümlemeli radyal tampondu.[26][27]
Tekerlek / aks montajının dinamik dengelenmesi
Tekerlekler üzerindeki krank pimi ve çubuk ağırlığı, statik denge ağırlığı için tekerlek düzlemi konumunun dışındaki bir düzlemdedir. Hızdaki dengesiz çiftin dengelenmesi gerekiyorsa 2 düzlemli veya dinamik dengeleme gereklidir. Kullanılan ikinci düzlem karşı tekerlekte.
2 düzlemli veya dinamik bir lokomotif tekerlek setinin dengelenmesi, çapraz dengeleme olarak bilinir.[15] Çapraz dengeleme 1931 yılına kadar Amerikan Demiryolları Birliği tarafından tavsiye edilmiyordu. O zamana kadar Amerika'da sadece statik dengeleme yapıldı, ancak inşaatçılar belirtildiğinde ihracat lokomotifleri için çapraz dengeleme dahil ettiler. Avrupa'daki inşaatçılar, Le Chatelier 1849'da teorisini yayınladıktan sonra çapraz dengelemeyi benimsedi.[28]
Kabul edilebilir çekiç darbesinin belirlenmesi
Maksimum tekerlek ve aks yükleri belirli bir köprü tasarımı için belirtilmiştir, böylece çelik köprülerin gerekli yorulma ömrü elde edilebilir.[29] Aks yükü genellikle 2 tekerlek yükünün toplamı olmayacaktır çünkü çapraz dengelemenin hareket çizgisi her tekerlekte farklı olacaktır.[30] Lokomotifin statik ağırlığı bilinerek, ileri geri hareket eden parçaları kısmen dengelemek için her bir tekerleğe konulabilecek aşırı balans miktarı hesaplanır.[31] Geçen bir lokomotifin altındaki bir köprüde ölçülen suşlar ayrıca piston itişinden bir bileşen içerir. Bu, her tekerlekte izin verilen aşırı balans nedeniyle yukarıdaki hesaplamalarda ihmal edilmiştir. Dikkate alınması gerekebilir.[32]
Tekerleğin çekiç darbesine tepkisi
Dönme kuvveti, tekerlek yükünü dönüşümlü olarak azalttığı ve her devirde artırdığı için, temas yamasındaki sürdürülebilir çekiş gücü, tekerlek dönüşü başına bir kez düşer ve tekerlekler kayabilir.[33] Kaymanın meydana gelip gelmediği, çekiç darbesinin aynı anda tüm bağlı tekerleklere kıyasla nasıl olduğuna bağlıdır.
Yüksek kayma hızlarından kaynaklanan aşırı çekiç darbesi, 1934 A.A.R.'yi izleyen yeni Kuzey Amerika 4-6-4'ler ve 4-8-4'ler ile rayların bükülmesine neden oldu. karşılıklı ağırlığın% 40'ını dengeleme önerisi.[12]
Çarktaki dengesiz atalet kuvvetleri, palet sertliğine bağlı olarak farklı dikey salınımlara neden olabilir. Greslenmiş ray bölümleri üzerinde yapılan kayma testleri, bir durumda, 165 mil / saat kayma hızında rayın hafif işaretlendiğini, ancak daha yumuşak yolda 105 mil / saat hızla ciddi ray hasarı olduğunu göstermiştir.[34]
Biyel kolu açısallığından kaynaklanan piston itme kuvveti
Buhar motoru çapraz kafalı kayma yüzeyi, krank pimi üzerindeki bağlantı kolu kuvvetine tepki sağlar ve krank milinin her dönüşü sırasında sıfır ile maksimum iki arasında değişir.[35]
Tekerleğin her bir devri için dönüşümlü olarak ekleyen ve çıkaran çekiç darbesinin aksine, piston itme hareketi, hareket yönüne ve lokomotifin kayıyor mu yoksa sürükleniyor mu olduğuna bağlı olarak, her devirde iki kez statik ortalamaya eklenir veya ondan çıkarır.
Bir demiryolu lokomotifinde kullanıldığı gibi, çift etkili bir buhar motorunda, kaydırma çubuğu üzerindeki dikey itme yönü, ileri doğru hareket ederken daima yukarı doğrudur. Biyel ve krank arasındaki açı en büyük olduğunda, strok sonunda sıfırdan yarım strokta maksimuma değişir.[36] Krank pimi pistonu hareket ettirdiğinde, tıpkı kayarken olduğu gibi, piston itme kuvveti aşağı doğrudur. Maksimum itme konumu, kaydırma çubuklarının ortasındaki artan aşınma ile gösterilir.[37]
The tendency of the variable force on the upper slide is to lift the machine off its lead springs at half-stroke and ease it down at the ends of stroke. This causes a pitching and, because the maximum up force is not simultaneous for the 2 cylinders it will also tend to roll on the springs.[36]
Similarities with balancing other machinery
The dynamic balancing of locomotive wheels, using the wheels as the balancing planes for out-of-balance existing in other planes, is similar to the dynamic balancing of other rotors such as jet engine compressor/turbine assemblies. Residual out-of-balance in the assembled rotor is corrected by installing balance weights in 2 planes that are accessible with the engine installed in the aircraft. One plane is at the front of the fan and the other at the last turbine stage.[38]
Ayrıca bakınız
Referanslar
Alıntılar
- ^ "AutoZine Technical School". www.autozine.org. Alındı 6 Ağustos 2019.
- ^ Foale 2007, s. 2, Fig. 2a.
- ^ "Primary Engine Balance - Explained". www.youtube.com. Engineering Explained. Alındı 20 Mart 2020.
- ^ "Investigations into the Excitation of Low Frequency Half Order Vibrations in a Diesel Passenger Car Powertrain". www.sae.org. 1 Mayıs 1993. Alındı 20 Mart 2020.
- ^ Nakada, T. (1 October 1996). "Excitation mechanism for engine vibration of half-order components". Jsae Review. 17 (4): 387–393. doi:10.1016/S0389-4304(96)00047-1. Alındı 20 Mart 2020.
- ^ Foale 2007, s. 4, Fig. 4. reciprocating forces (piston motion = red, primary = blue, secondary = green).
- ^ Foale 2007, s. 6, Fig. 13. 360°-crank parallel twin.
- ^ Foale 2007, s. 6, Fig. 13. 180°-crank parallel twin.
- ^ "sne-journal.org" (PDF). Arşivlenen orijinal (PDF) 2016-11-22 tarihinde. Alındı 2016-11-21.
- ^ Sagawa, Kentaro, VFR1200F, Real value of the progress (in Japanese), alındı 2014-02-09
- ^ Foale 2007, s. 17, Fig. 14. Plane offset.
- ^ a b Jarvis, J. M., The Balancing of the BR Class 9 2-10-0 Locomotives
- ^ Clark 1855, s. 193.
- ^ Johnson 2002, s. 256.
- ^ a b Bevan 1945, s. 458
- ^ Clark 1855, s. 178.
- ^ Proceedings of the American International Association of Railway Superintendents of Bridges and Buildings, s. 195
- ^ The Pennsylvania Railroad System at the Louisiana Purchase Exposition - Locomotive Tests and Exhibits, The Pennsylvania Railroad Company, 1905, pp. 109, 531, 676
- ^ Fry 1933, s. 444.
- ^ Bevan 1945, s. 456.
- ^ Johnson 2002, s. 252.
- ^ Dalby 1906, s. 102.
- ^ Fry 1933, s. 431.
- ^ US 2125326, "Engine-Tender Buffer Mechanism"
- ^ Garbe, Robert (1908), The Application of Highly Superheated Steam to Locomotives, s. 28
- ^ Johnson 2002, s. 267.
- ^ martynbane.co.uk
- ^ Fry 1933, s. 411.
- ^ Dick, Stephen M., Fatigue Loading and Impact Behaviour of Steam Locomotives, Hanson-Wilson
- ^ Fry 1933, s. 434.
- ^ Fry 1933, s. 432.
- ^ Fry 1933, s. 442.
- ^ Bevan 1945, s. 457.
- ^ Johnson 2002, s. 265.
- ^ Ripper, William (1903), Steam Engine Theory And Practice, Longman's Green And Co., fig. 301
- ^ a b Clark 1855, s. 167.
- ^ Commission, British Transport (1998), Handbook for Railway Steam Locomotive Enginemen, s. 92, ISBN 0711006288
- ^ White, J. L.; Heidari, M. A.; Travis, M. H., Experience in Rotor Balancing of Large Commercial Jet Engines, Boeing Commercial Airplane Group, fig .3
Kaynaklar
- Swoboda, Bernard (1984), Mécanique des moteurs alternatifs, 331 pages, 1, rue du Bac 75007, PARIS, FRANCE: Editions TECHNIP, ISBN 9782710804581CS1 Maint: konum (bağlantı)
- Foale, Tony (2007), Some science of balance (PDF), Tony Foale Designs: Benidoleig, Alicante, Spain, arşivlendi (PDF) from the original on 2013-12-27, alındı 2013-11-04
- Taylor, Charles Fayette (1985), The Internal Combustion Engine in Theory and Practice, Cilt. 2: Combustion, Fuels, Materials, Design, Massachusetts: The MIT Press, ISBN 0-262-70027-1
- Daniel Kinnear Clark (1855), Railway Machinery, 1st ed., Blackie and Son
- Johnson, Ralph (2002), The Steam Locomotive, Simmons-Boardman
- Fry, Lawford H. (1933), "Locomotive Counterbalancing", Amerikan Makine Mühendisleri Derneği'nin İşlemleri
- Dalby, W. B. (1906), The Balancing of Engines, Edward Arnold, Chapter IV – The Balancing of Locomotives
- Bevan, Thomas (1945), The theory of Machines, Longmans, Green and Co