Nüfus protokolü - Population protocol
Bir nüfus protokolü bir dağıtılmış hesaplama bir modele göre rastgele bir şekilde buluşan sınırlı kaynak mobil aracılar tarafından oluşturulan etkileşim grafiği. Fonksiyonlar, önceki durumlarına göre karşılaştıklarında aracıların durumu güncellenerek hesaplanır ve hesaplamanın sonucu, hesaplama yapıldıktan sonra aracıların durumlarında okunabilir. Bütünleşik.
Modeli
Bir set var düğüm sayısı. Her düğüm, sonlu bir otomattır. devletler. Önemli bir popülasyon protokolleri sınıfı, amacın çoğunluk bitini hesaplamak olduğu çoğunluk algoritmalarıdır: her düğüm, bir inanç biti ile başlar. ve amaç, sonunda her düğümün inanç bitinin doğru ilk çoğunluk biti olduğu bir protokol tasarlamaktır.



Modelin ayrık zamanlı versiyonu aşağıdaki gibidir: her noktada zamanla, bazı düğümler rastgele olarak eşit olarak seçilir. Ardından düğüm başka bir düğümle eşleştirilir , düğümün komşuları kümesinden tek tip olarak rastgele seçilir . Daha sonra düğümler ve bellek içeriklerini değiştirin ve durumlarını güncelleyin. Alternatif olarak, her düğümün bulunduğu sürekli bir zaman modeli düşünülebilir. birim oranda çalan bir Poisson saate sahiptir. Bir düğümün saati çaldığında, bu düğüm rastgele bir komşu ile iletişim kurar.



Protokoller genellikle yakınsama süresini veya düğüm başına gereken bellek miktarını veya her ikisini en aza indirmek için tasarlanır.[1]
Üç Eyalet Protokolü
Çoğunluğu hesaplama problemi için (fikir birliği), düğüm başına yalnızca üç bellek durumu gerektiren ve tam etkileşim grafikleri için analiz edilmiş iyi bilinen bir protokol vardır.[2][3] Bu protokol aşağıdaki gibi çalışır. Her düğümün hafıza durumunu ilk inanç bitine göre başlat Zamanın her noktasında, iki düğüm iletişim kurduğunda, durumlarını aşağıdaki tabloya göre güncellerler. Satır etiketleri, başlatıcının durumunu verir ve sütun yanıtlayıcının durumunu etiketler.

| 0 | ? | 1 | |
|---|---|---|---|
| 0 | (0,0) | (0,0) | (0,?) |
| ? | (?,0) | (?,?) | (?,1) |
| 1 | (1,?) | (1,1) | (1,1) |
Örneğin, inançlı bir düğüm inançla bir düğümle eşleşir , sonra her iki düğüm de inançlarını korur; güncelleme benzer, eğer her iki inanç da veya her ikisi de . Ancak, başlatıcının inancı ise ve yanıtlayanın inancı , ardından katılımcı inancını günceller . Öte yandan, başlatanın inancı varsa ve cevap verenin inancı var yanıtlayan kişi inancını değiştirir . Bu protokolün tek yönlü olduğunu unutmayın: her etkileşim en çok yanıtlayanın durumunda değişir; bu nedenle tek yönlü iletişim ile uygulanabilir.



Angluin, Aspnes ve Eisenstat [2] her şeyi içermeyen herhangi bir ilk yapılandırmadan ""s, üç durumlu yaklaşık çoğunluk protokolü, inanca sahip tüm düğümlerden birine yakınsar ya da inancı olan tüm düğümler içinde yüksek olasılıklı etkileşimler. Ek olarak, seçilen değer çoğunluk olmayan ""Azınlığı yeterli bir marjla aşması koşuluyla başlangıç değeri.

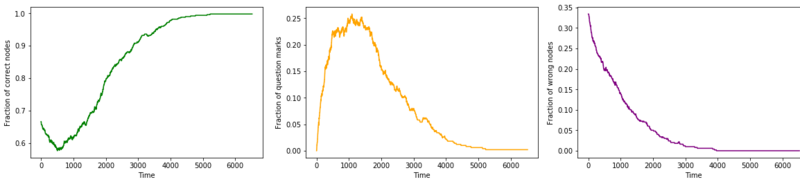
Aşağıdaki resim, üç durumlu protokolün bir dizi düğümlerin üçte birinin başlangıç inanç bitine sahip olduğu düğümler geri kalan üçte ikisi ilk inanç bitine sahipken . "Kesiri"düğümler (turuncu) sıfırdan başlar, bir süre artar ve sonra tekrar sıfıra gider.

Tarih
Nüfus protokolleri, Dana Angluin et al.[4] ilklerden biri olarak hesaplama modelleri tamamen olmak merkezi olmayan ve kaynakları son derece sınırlı olan temsilcileri dahil etmek için sensör ağları. O zamandan beri, bu soyut hesaplama modeli, robotik[5] ve kimya.[6]
Ayrıca bakınız
Referanslar
- ^ Alistarh, Dan; Aspnes, James; Eisenstat, David; Gelashvili, Rati; Rivest, Ronald L. (2017-01-16). "Nüfus protokollerinde zaman-uzay değiş tokuşları". Soda '17. Endüstriyel ve Uygulamalı Matematik Derneği: 2560–2579. arXiv:1602.08032. Bibcode:2016arXiv160208032A. Alıntı dergisi gerektirir
| günlük =(Yardım) - ^ a b Angluin, Dana; Aspnes, James; Eisenstat, David (2007), "Hızlı Sağlam Yaklaşık Çoğunluk İçin Basit Bir Nüfus Protokolü", Dağıtık Hesaplama, Bilgisayar Bilimleri Ders Notları, 4731, Springer Berlin Heidelberg, s. 20–32, doi:10.1007/978-3-540-75142-7_5, ISBN 9783540751410
- ^ Perron, E .; Vasudevan, D .; Vojnovic, M. (Nisan 2009). "Tam Grafiklerde İkili Konsensüs için Üç Durumun Kullanılması". IEEE INFOCOM 2009 - 28. Bilgisayar İletişimi Konferansı. IEEE: 2527–2535. doi:10.1109 / infcom.2009.5062181. ISBN 9781424435128.
- ^ Dana Angluin James Aspnes, Zoë Diamadi, Michael J. Fischer René Peralta. Pasif mobil sonlu durum sensörlerinin ağlarında hesaplama. Dağıtık Hesaplama, 2006. [1]

- ^ Gregory Dudek, Michael Jenkin. Mobil Robotiklerin Hesaplama PrensipleriBölüm 10.
- ^ Ho-Lin Chen, David Doty, David Soloveichik. Kimyasal reaksiyon ağları ile deterministik fonksiyon hesaplaması. Doğal Hesaplama, 2014. [2]
| Genel | |
|---|---|
| Seviyeler | |
| Çoklu kullanım | |
| Teori | |
| Elementler | |
| Koordinasyon | |
| Programlama | |
| Donanım | |
| API'ler | |
| Problemler | |
| |