Hiperbolik navigasyon - Hyperbolic navigation - Wikipedia



Hiperbolik navigasyon modası geçmiş bir sınıf radyo navigasyonu bir gemi veya hava taşıtı üzerindeki bir navigasyon alıcısının, zamanlamadaki farka dayalı olarak konumu belirlemek için kullanıldığı sistemler. Radyo dalgaları sabit kara telsizinden alındı navigasyon işaretçisi vericiler. Zamanlamadaki farkın ölçülmesi (evre İki işaretten alınan radyo sinyallerinin), alıcının işaretlere olan uzaklığındaki farkı verir. Ölçülen gecikme için alıcının tüm potansiyel konumlarının grafiğini çizmek, alıcıyı bir hiperbolik bir grafikte çizgi. İki çift işaretten zamanlama ölçümleri almak, bu tür iki hiperbolik çizgi verir ve alıcının konumu, hatların kesişme noktasındadır. İki çizgi iki noktada kesişebilir, bu durumda alıcının konumu olan noktanın belirlenmesi için başka navigasyon bilgileri kullanılır.
Hiperbolik konum sistemleri ilk olarak birinci Dünya Savaşı içinde akustik konum düşmanı bulmak için sistemler topçu. Ateşlenmekte olan bir merminin sesi birkaç mikrofon tarafından alındı ve alım zamanı, konumu belirlemek için bir bilgi işlem merkezine gönderildi. Bu sistemler Dünya Savaşı II. İlk hiperbolik radyo seyrüsefer sistemi, Dünya Savaşı II -era Vay be tarafından tanıtıldı Kraliyet Hava Kuvvetleri tarafından kullanılmak üzere RAF Bombacı Komutanlığı. Bunu takip eden Decca Navigator Sistemi tarafından 1944'te Kraliyet donanması, ile birlikte LORAN tarafından ABD Donanması denizde uzun menzilli seyrüsefer için. Tanınmış ABD Sahil Güvenlik dahil savaş sonrası örnekleri LORAN-C, Uluslararası Omega sistem ve Sovyet Alfa ve CHAYKA. Tüm bu sistemler, toptan değiştirilinceye kadar kullanıldı. uydu navigasyon sistemleri gibi Küresel Konumlandırma Sistemi (GPS) 1990'larda.
Temel konseptler
Birbirlerinden belirli bir mesafede bulunan iki yer tabanlı radyo istasyonunu düşünün, diyelim ki 300 km. ışık hızı. Her iki istasyon, belirli bir frekansta kısa bir darbe yayınlamak üzere ayarlanmış özdeş vericilerle donatılmıştır. "İkincil" olarak adlandırılan bu istasyonlardan biri aynı zamanda bir radyo ile donatılmıştır. alıcı. Bu alıcı, diğer istasyondan gelen ve "ana" olarak adlandırılan sinyali duyduğunda, kendi yayınını tetikler. Ana istasyon daha sonra herhangi bir darbe serisini yayınlayabilir, ikincil bunları işitir ve 1 ms gecikmeden sonra aynı seriyi üretir.
İki istasyon arasında çizilen çizginin orta noktasında yer alan taşınabilir bir alıcı düşünün. temel. Bu durumda, sinyallerin alıcıya ulaşması zorunlu olarak 0,5 ms sürer. Bu süreyi ölçerek, her iki istasyondan da tam olarak 150 km uzakta olduklarını ve böylece yerlerini tam olarak belirleyebildiler. Alıcı, hat boyunca başka bir konuma hareket ederse, sinyallerin zamanlaması değişecektir. Örneğin, sinyalleri 0.25 ve 0.75 ms'de zamanlarlarsa, daha yakın istasyondan 75 km ve uzak istasyondan 225 km uzaklıktadırlar.
Alıcı taban çizgisinin kenarına hareket ederse, gecikme her ikisi de istasyonlar büyüyecek. Bir noktada, örneğin, 1 ve 1.5 ms'lik bir gecikme ölçecekler, bu da alıcının bir istasyondan 300 km ve diğerinden 450 km uzakta olduğu anlamına geliyor. Bir harita üzerindeki iki istasyonun etrafına 300 ve 450 km yarıçaplı daireler çizerseniz, daireler iki noktada kesişecektir. Herhangi bir ilave navigasyon bilgisi kaynağıyla, bu iki kavşaktan biri bir olasılık olarak elenebilir ve böylece tam konumları veya "düzeltmeleri" ortaya çıkarılabilir.
Mutlak ve diferansiyel zamanlama
Bu yaklaşımda ciddi bir pratik sorun vardır - sinyallerin alıcıya ulaşması için geçen süreyi ölçmek için, alıcının sinyalin ilk gönderildiği zamanı tam olarak bilmesi gerekir. İşbirliği yapmayan sinyal kaynakları (düşman topçuları gibi) durumunda bu mümkün değildir ve hatta modern zamanlarda, uzay aracıyla senkronize atomik saatlere sahip GPS alıcıları çok nadirdir.
1930'larda, böylesine hassas zaman ölçümleri mümkün değildi; gerekli doğrulukta bir saat, taşınabilir bir yana, sabit biçimde inşa edilecek kadar zordu. Yüksek kaliteli kristal osilatör örneğin, bir ayda yaklaşık 1 ila 2 saniye kayması veya 1.4×10−3 saat başına saniye.[1] Bu kulağa küçük gelebilir, ancak ışık saniyede 300 milyon metre (saniyede 190.000 mil) hareket ederken, bu saatte 400 m'lik bir kaymayı temsil eder. Sadece birkaç saatlik uçuş süresi, böyle bir sistemi kullanılamaz hale getirebilirdi, bu durum ticari piyasaya sürülene kadar yürürlükte kaldı. atom saatleri 1960'larda.
Bununla birlikte, doğru bir şekilde ölçmek mümkündür. fark iki sinyal arasında. Uygun teçhizatın geliştirilmesinin çoğu, dağıtım çabalarının bir parçası olarak 1935 ile 1938 yılları arasında gerçekleştirilmiştir. radar sistemleri. İngiltere özellikle, onların geliştirilmesine önemli çaba harcamışlardır. Zincir Ana Sayfa sistemi. radar ekranı Chain Home için sistemler temel alındı osiloskoplar (ya da osilograflar o sırada bilindikleri şekliyle) yayın sinyali gönderildiğinde taramalarını başlatmak için tetiklendi. Dönüş sinyalleri güçlendirildi ve bir "blip" üreterek "osiloskop ekranına gönderildi". Herhangi bir blipin osiloskop yüzü boyunca mesafeyi ölçerek, yayın ve alım arasındaki zaman ölçülebilir ve böylece hedefe olan menzil ortaya çıkarılır.
Çok küçük bir modifikasyonla, aynı ekran iki rastgele sinyal arasındaki farkı zamanlamak için kullanılabilir. Seyrüsefer kullanımı için, ana cihazı ikincil sinyallerden ayırmak için herhangi bir sayıda tanımlayıcı özellik kullanılabilir. Bu durumda, taşınabilir alıcı, ana sinyali aldığında izini tetikledi. İkincilden gelen sinyaller geldiğinde, radardaki bir hedefle aynı şekilde ekranda bir kesintiye neden olurlar ve ana ile ikincil arasındaki kesin gecikme kolayca belirlenir.
Orijinal mutlak zamanlı vakalarımızla aynı örnekleri düşünün. Alıcı, taban çizgisinin orta noktasında bulunuyorsa, iki sinyal tam olarak aynı anda alınacaktır, bu nedenle aralarındaki gecikme sıfır olacaktır. Bununla birlikte, gecikme sadece her iki istasyondan 150 km uzakta ve dolayısıyla taban çizgisinin ortasında bulunuyorsa değil, aynı zamanda her iki istasyondan 200 km uzaklıkta ve 300 km ve benzeri konumdaysa sıfır olacaktır. Dolayısıyla bu durumda alıcı tam konumunu belirleyemez, yalnızca konumlarının taban çizgisine dik bir çizgi boyunca bir yerde olduğunu belirler.
İkinci örnekte alıcılar zamanlamayı 0,25 ve 0,75 ms olarak belirlediler, bu nedenle bu 0,5 ms'lik ölçülen bir gecikme üretecektir. Bu farkı oluşturabilecek pek çok konum vardır - 0,25 ve 0,75 ms, aynı zamanda 0,3 ve 0,8 ms, 0,5 ve 1 ms, vb. Bu olası konumların tümü çizilirse, taban çizgisinde ortalanmış bir hiperbolik eğri oluştururlar. Seyir haritaları, seçilen gecikmeler için eğrilerle, örneğin her 0.1 ms'de bir çizilebilir. Operatör daha sonra gecikmeyi ölçerek ve tabloya bakarak bu çizgilerden hangisinin üzerinde olduğunu belirleyebilir.
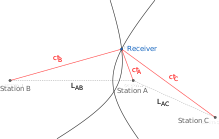
Tek bir ölçüm, tek bir düzeltmeyi değil, bir dizi olası konumu ortaya çıkarır. Bu sorunun çözümü, başka bir konuma başka bir ikincil istasyon eklemektir. Bu durumda, biri ana ve ikincil "A" ve diğeri ana ve ikincil "B" arasındaki fark olmak üzere iki gecikme ölçülecektir. Tablodaki her iki gecikme eğrisine bakılarak, iki kavşak bulunacak ve bunlardan biri alıcının olası konumu olarak seçilebilir. Bu, doğrudan zamanlama / mesafe ölçümlerinde olduğu gibi benzer bir tespittir, ancak hiperbolik sistem, bir osiloskoba bağlanmış geleneksel bir radyo alıcısından başka bir şeyden oluşmaz.
Bir sekonder, ana sinyal alındığında sinyal darbesini anında iletemediği için, sinyale sabit bir gecikme oluşturuldu. Hangi gecikme seçilirse seçilsin, iki sekonderden gelen sinyalin aynı anda alınacağı ve bu nedenle ekranda görülmesini zorlaştıran bazı yerler olacaktır. Bir sekonderin diğerinden belirlenmesi için bir yöntem gerekliydi. Yaygın yöntemler, ikincilden yalnızca belirli zamanlarda iletmeyi, farklı frekansları kullanarak, sinyal patlamasının zarfını ayarlamayı veya belirli bir modelde birkaç patlama yayınlamayı içeriyordu. Ana ve ikincil istasyonlardan oluşan bir dizi "zincir" olarak biliniyordu. Belirli bir konumda birden fazla zincirin alınabileceği durumda zincirleri tanımlamak için benzer yöntemler kullanılır.
Operasyonel sistemler
Meint Harms, 1931'de Seefahrtschule Lübeck'teki (Navigasyon Koleji) yüksek lisans sınavının bir parçası olarak konuyla ilgili derin düşünmelerle başlayarak hiperbolik bir navigasyon sistemi kurmaya çalışan ilk kişi oldu. Lübeck'teki Kaisertor'da Matematik, Fizik ve Navigasyon Profesörü pozisyonunu aldıktan sonra Harms, basit vericileri ve alıcıları kullanarak hiperbolik navigasyonu göstermeye çalıştı. 18 Şubat 1932'de Reichspatent-Nr aldı. 546000 icadı için.[2][3]
Vay be
İlk operasyonel hiperbolik navigasyon, Birleşik Krallık Vay be, ilk olarak deneysel olarak kullanıldı RAF Bombacı Komutanlığı Gee, hem Almanya üzerinde bombalama hem de Birleşik Krallık bölgesinde navigasyon, özellikle geceleri iniş için kullanıldı. Birleşik Krallık'ta birkaç Gee zinciri inşa edildi ve savaştan sonra bu, Birleşik Krallık'ta dört, Fransa'da iki ve kuzey Almanya'da bir zincir için genişletildi. Oluşumunu takip eden bir süre için Uluslararası Sivil Havacılık Organizasyonu 1946'da Gee, dünya çapında bir navigasyon standardının temeli olarak kabul edildi, ancak VHF çok yönlü aralığı Bunun yerine (VOR) sistemi seçildi ve son Gee zinciri sonunda 1970'te kapatıldı.[4]
Belirli bir zincirden gelen Gee sinyallerinin hepsi tek bir frekansta gönderildi. Ana istasyon iki sinyal gönderdi, bir zamanlama periyodunun başlangıcını belirleyen "A" sinyali ve sonunu işaretlemek için esasen iki "A" olan "D" sinyali. Her periyotta, iki sekonderden biri "B" ve "C" sinyallerini değiştirerek yanıt verir. Elde edilen model "ABD… ACD… ABD…" idi. Zinciri ayarlamak için geniş bantlı bir alıcı kullanıldı ve çıktı operatörün osiloskop. İstasyonlar frekans bakımından birbirine yakın olduğundan, bu bazen birkaç istasyondan gelen sinyallerin ekranda görünmesine neden oldu. Bu durumlarda zincirleri ayırt etmek için, bazen ikinci bir "A" sinyali, "A1" veya "hayalet A" girilir ve ekrandaki yanıp sönme modeli zinciri tanımlamak için kullanılabilir.[4]
Operatör başlangıçta alıcısında, bazen yakınlarda bulunan diğer zincirler de dahil olmak üzere ekranda bir darbe akışı görmek için ayarladı. Daha sonra, osiloskobun izinin tetikleyicisini başlatan yerel bir osilatörü ayarlayacaktı, böylece ana istasyondaki saate uyacak (ki bu zamanla değişebilir ve değişti). Daha sonra, sinyalin başlangıcını hareket ettirmek için değişken bir gecikme kullanacaktır, böylece "A" darbelerinden biri, "skop" un en sol tarafındaydı (eylem, analog bir televizyondaki "yatay tutma" kadranıyla aynıdır). Son olarak, ekrandaki izlemenin hızı ayarlanacak, böylece D darbesi sadece sağda görünecekti. B veya C darbesinin A darbesinden uzaklığı artık ekli bir ölçekle ölçülebilir. Ortaya çıkan gecikmeler daha sonra bir seyir çizelgesinde incelenebilir.[4]
Görüntü nispeten küçüktü, bu da çözünürlüğü ve dolayısıyla gecikmenin belirlenmesini sınırladı. 1 mikrosaniyelik bir ölçüm doğruluğu, yaklaşık 150 metreye kadar doğru hiperbolik tespitinin doğruluğuyla sonuçlandı ve bu tür iki ölçüm birleştirildiğinde ortaya çıkan sabitleme doğruluğu yaklaşık 210 m idi. Daha uzun menzillerde, örneğin 350 mil, hata elips yaklaşık 6 mil x 1 mil idi. Maksimum menzil yaklaşık 450 mil idi.[4] Olağandışı koşullar altında birkaç uzun vadeli düzeltme yapılmasına rağmen.
LORAN
ABD ayrıca 1940 gibi erken bir tarihte hiperbolik navigasyonu düşünmüş ve Gee'ye benzeyen Proje 3 olarak bilinen bir geliştirme çabası başlatmıştı. Zaten üretime girmekte olan Gee ile tanıştırıldıklarında sadece durdurma ilerlemesi kaydedilmişti. Gee hemen seçildi 8 Hava Kuvvetleri ve Proje 3 ekibi dikkatini diğer kullanımlara çevirdi ve sonunda konvoy özellikle navigasyon.
Yeni konsept aşağıdakilerin kullanımına dayanıyordu: gökyüzü dalgaları darbelerin çok uzun menzillerde alınmasına izin vermek için. Bu, Gee'nin görüş hattı sisteminden çok daha karmaşık alınan sinyaller üretti ve yorumlanması daha zordu. Ancak bu istisna dışında, iki sistem konsept olarak çok benzerdi ve frekans seçimleri ve darbe zamanlamasının ayrıntıları açısından büyük ölçüde farklıydı. Robert J. Dippy, Gee'nin mucidi, yer istasyonlarının ayrıntılarına yardımcı olmak için 1942'nin ortalarında ABD'ye taşındı. Bu süre zarfında, alıcıların havadan bir versiyonunun yapılmasını ve Gee ile değiştirilebilmesini istedi. Ortaya çıkan sistem şu şekilde ortaya çıktı: LORAN, LOng RAnge Navigation için ve iki istasyondan oluşan ilk zincir Haziran 1942'de yayına girdi.[5] LORAN oldu LORAN-A Yerine konma tasarımı başladığında, bu başlangıçta LORAN-B konseptiydi, ancak sonunda 1957'de başlayan çok uzun menzilli LORAN-C ile değiştirildi.
LORAN sonunda 1.950 MHz'yi birincil çalışma frekansı olarak seçti. Ek bir kanal olarak gündüz kullanımı için 7,5 MHz seçildi, ancak hiçbir zaman operasyonel olarak kullanılmadı. Gee'nin havadan 450 mil (720 km) menziline kıyasla, LORAN su üzerinde yaklaşık 1.500 mil (2.400 km) ve karada 600 mil (970 km) menzile sahipti. İşlem genellikle Gee'ye benziyordu, ancak bir seferde yalnızca ikincil sinyallerden biri görüntüleniyordu. Bir düzeltme, operatörün bir gecikmeyi ölçmesini, ardından diğerini ve ardından grafiklerde ortaya çıkan gecikmeleri incelemesini gerektiriyordu. Bu, birkaç dakika sürebilen, zaman alan bir süreçti. Doğruluk, aralığın% 1'i olarak belirtildi.[5]
LORAN, bir zinciri tanımlamak için iki yöntem kullandı. Biri, Gee'deki gibi dört "kanallı" operasyonel frekanstı. İkincisi, darbelerin "yüksek", "düşük" ve "yavaş" hızlarla tekrarlanma hızıdır. Bu, herhangi bir alanda 12 zincire kadar izin verdi. Ek olarak, darbelerin orijinal sabit tekrarı daha sonra başka bir sekiz benzersiz model oluşturmak için değiştirildi ve toplam 96 istasyon çiftine izin verildi. Herhangi bir zincir, geniş kapsamlı kapsama için çok sayıda benzersiz sinyal talep eden bir veya daha fazla istasyon çifti kullanabilir.[5]
Decca Navigasyon Sistemi başlangıçta ABD'de geliştirildi, ancak sonunda Birleşik Krallık'taki Decca Radio şirketi tarafından konuşlandırıldı ve genellikle bir İngiliz sistemi olarak anıldı. Başlangıçta için geliştirildi Kraliyet donanması Gee'nin deniz versiyonlarına doğru bir ek olarak, Decca ilk kez 5 Haziran 1944'te rehberlik etmek için kullanıldı mayın tarama gemisi hazırlık aşamasında D Günü istilalar. Sistem savaş sonrası geliştirildi ve sivil kullanım için GEE ve diğer sistemlerle rekabet etti. Çeşitli nedenler, özellikle kullanım kolaylığı, dünya çapında toplam 42 zincirle 1990'larda yaygın kullanımda kalmasını sağladı. 1990'larda bir dizi istasyon güncellendi, ancak GPS'in yaygın kullanımı Decca'nın 31 Mart 2000'de gece yarısı kapatılmasına neden oldu.[6]
Decca, darbelerinin zamanlaması yerine sürekli sinyallerin fazlarını karşılaştırmaya dayanıyordu. Bu daha doğruydu, çünkü bir çift sinyalin fazı, Decca durumunda birkaç derece, dört derece içinde ölçülebiliyordu. Bu büyük ölçüde geliştirilmiş içsel doğruluk, Decca'nın Gee veya LORAN'dan çok daha uzun dalga boyları kullanmasına izin verirken, yine de aynı doğruluk seviyesini sunmaya devam etti. Daha uzun dalga boylarının kullanılması, Gee veya LORAN'dan daha iyi yayılma sağladı, ancak menziller genellikle temel sistem için yaklaşık 500 mil ile sınırlıydı.
Decca ayrıca, sinyalin yalnızca 360 derece kadar değişebilmesi ve istasyonların etrafında bir daire içinde tekrarlanan modelin dezavantajına sahipti. Bu, belirli bir faz ölçümünü karşılayan çok sayıda konum olduğu anlamına geliyordu, "faz belirsizliği" olarak bilinen bir sorun. Gee sizi iki konumdan birine ayarlarken, Decca sizi yüzlerce yerden birine sabitledi.
Decca, bu sorunu çözdü. kilometre sayacı "dekometreler" olarak bilinen benzeri ekran. Bir seyahate çıkmadan önce, navigatör dekometrenin şerit sayacını bilinen konumlarına ayarlayacaktır. Zanaat hareket ettikçe kadranın eli dönecek ve sıfırı geçtiğinde sayacı artıracak veya azaltacaktır. Bu numaranın ve mevcut kadran okumasının kombinasyonu, navigatörün mevcut gecikmeyi doğrudan okumasına ve bir grafikte aramasına olanak tanıdı, Gee veya LORAN'dan çok daha kolay bir işlem. Decca'nın daha sonra otomatik grafik oluşturma özelliği eklemesi çok daha kolaydı. hareketli harita görüntüsü. Sinyal zincirine daha sonra yapılan eklemeler, bölge ve şeridin doğrudan hesaplanmasına izin vererek şerit sayaçlarını manuel olarak ayarlama ihtiyacını ortadan kaldırdı ve sistemin kullanımını daha da kolaylaştırdı.[6]
Her bir ana ve ikincil sinyal farklı bir frekansta gönderildiği için, aynı anda herhangi bir sayıda gecikme ölçülebilir; pratikte üç çıktı üretmek için tek bir ana ve üç ikincil sistem kullanıldı. Her sinyal farklı bir frekansta gönderildiği için, "yeşil", "kırmızı" ve "mor" olarak bilinen üçünün de aynı anda kodu çözüldü ve üç dekometrede görüntülendi. Sekonderler birbirinden 120 derecelik açılarla fiziksel olarak dağıtıldı ve operatörün, istasyonlardan alıcıya mümkün olduğunca dik açılardan gönderilen sinyal çiftini ekranda seçmesine izin vererek doğruluğu daha da artırdı. Maksimum doğruluk normalde 200 yarda olarak belirtildi, ancak bu operasyonel hatalara maruz kaldı.[6]
Daha fazla doğruluk ve kullanım kolaylığına ek olarak, Decca karada kullanım için de daha uygundu. Kırılmaya bağlı gecikmeler, nabız zamanlaması üzerinde önemli bir etkiye sahip olabilir, ancak faz değişiklikleri için çok daha azdır. Böylece Decca, pist yaklaşma yardımlarının aşağıdaki gibi olduğu helikopter kullanımı için büyük bir talep içinde buldu. ILS ve VOR küçük hava alanları için uygun değildi ve esasen uçağın kullanıldığı rastgele yerler. Decca'nın ciddi bir dezavantajı, özellikle gürültüye duyarlı olmasıdır. Şimşek. Bu, fırtınaları beklemeyi göze alabilecek gemiler için ciddi bir endişe değildi, ancak zamanın önemli olduğu uzun menzilli hava seyrüseferi için uygun değildi. Bu rol için Decca'nın çeşitli sürümleri, özellikle de DECTRA ve DELRAC tanıtıldı, ancak bunlar yaygın kullanım görmedi.[7][8]
LORAN-C
LORAN-A, Gee temelinde hızlı bir şekilde inşa edilecek şekilde tasarlandı ve çalışma frekansını, uzun su menziline duyulan ihtiyaç ile seçilen minimum doğruluk kombinasyonuna göre seçti. MHz yerine kHz'de çok daha düşük frekansların kullanılması sistemin menzilini büyük ölçüde genişletecektir. Bununla birlikte, düzeltmenin doğruluğu, dalga boyu Daha düşük frekanslarda artan sinyalin diğer bir deyişle, daha düşük bir frekans kullanılması, sistemin doğruluğunu zorunlu olarak düşürecektir. En iyisi umuduyla, "LF Loran" ile yapılan erken deneyler, doğruluğun tahmin edilenden çok daha kötü olduğunu kanıtladı ve bu hatlardaki çabalar azaldı.[9] Bunu, Decca benzeri Cyclan ve Navarho konseptleri de dahil olmak üzere birkaç düşük frekanslı durdurma çabası izledi. Bunların hiçbiri Decca üzerinde gerçek bir ilerleme sağlamadı; ya marjinal olarak geliştirilmiş menzil ya da daha iyi menzil sundular, ancak kullanışlı olamayacak kadar az doğruluk.
Gee ve LORAN-A, osiloskobun geliştirilmesiyle mümkün hale geldi - bundan önce zamanın doğru ölçümü mümkün değildi. LORAN-C, düşük maliyetli faz kilitli döngü (PLL) 1950'lerde. Bir PLL, bu giriş periyodik veya zayıf bir şekilde alınmış olsa bile, bir giriş sinyali ile aynı frekans ve faza sahip sabit bir çıkış sinyali üretir. Bu durumda önemli özellik, PLL'nin bir dizi kısa darbeden sürekli bir sinyalin yeniden yapılandırılmasına izin vermesiydi. PLL kullanan bir sistem, Gee gibi tek bir darbeli sinyal alabilir ve ardından Decca gibi, faz ölçümü için sürekli bir ton oluşturabilir.
Cyclan vericilerin yeniden kullanılması, ABD Donanması 1950'lerin ortasında böyle bir sistemle deneyler başlattı ve 1957'de sistemi kalıcı olarak açtı. Çok sayıda zincir izledi ve sonunda ABD müttefikleri ve varlıklarının yakınında dünya çapında kapsama alanı sağladı.[9] Decca kadar doğru olmasa da, makul doğruluk ve uzun menzillerin bir kombinasyonunu sundu, o zamanlar kullanılan hemen hemen tüm diğer sistemleri geçersiz kılan ve kademeli olarak geri çekilmelerine yol açan bir kombinasyon. LORAN-C, GPS nihayet 8 Şubat 2010'da kapanana kadar, uydu navigasyon çağında hizmette kaldı.[10]
Temel işlemde, LORAN-C, Decca'ya Gee veya LORAN-A'dan daha benzerdir, çünkü konumu belirlemenin ana yolu sinyaller arasındaki faz farklılıklarının karşılaştırılmasıdır. Bununla birlikte, düşük frekanslarda ve uzun menzillerde, sinyalin mevcut fazına mı, yoksa sinyalin bir döngü önceki fazına mı yoksa belki de bir döngüden yansıyan fazına mı baktığınızı bilmek zor olacaktır. iyonosfer. Bu belirsizliği azaltmak için bir tür ikincil bilgiye ihtiyaç vardır. LORAN-C bunu, her istasyonun benzersiz bir şekilde tanımlanabilmesi için darbelerde benzersiz ayrıntılar göndererek başardı.
Ana istasyon, istasyonu tanımlamak için kullanılan her darbe arasındaki hassas zamanlama ile birlikte, dokuz darbelik bir dizi yayınladığında sinyal başlatıldı. İkincil istasyonların her biri, hangi istasyon olduklarını ortaya çıkaran desenlerdeki sekiz darbeden oluşan kendi sinyallerini gönderdiler. Alıcılar sinyal zamanlamalarını zincirleri seçmek, sekonderleri tanımlamak ve iyonosferden seken sinyalleri reddetmek için kullanabilir.[11]
LORAN-C zincirleri, Ana istasyon, M ve en fazla beş İkincil istasyon, V, W, X, Y, Z olarak organize edildi. Hepsi, önceki sistemlerden çok daha düşük bir frekansta olan 100 kHz'de yayınlandı. Sonuç, gündüz 2,250 millik bir yer dalgası aralığı, 1,650 millik gece yer dalgası ve 3,000 millik gökyüzü dalgaları sunan bir sinyaldi. Zamanlama doğruluğu 0.15 mikrosaniye olarak tahmin edildi ve 50 ila 100 metre arasında doğruluklar sunuyordu. Gerçek dünya kullanımında, Sahil Güvenlik 0,25 deniz mili veya daha iyi mutlak doğruluk oranı verdi.[12]
Omega
Operasyonel kullanıma giren son hiperbolik navigasyon sistemlerinden biri, geliştirilecek en eski navigasyon sistemlerinden biriydi; Omega, Decca aşama karşılaştırma sistemiyle aynı temel fikir üzerinde çalışarak 1940'larda John Alvin Pierce tarafından çalışarak geçmişini izler. Özellikle orta doğruluklu küresel navigasyon için bir sistem hayal etti ve bu nedenle sinyalin temeli olarak 10 kHz'lik son derece düşük frekansı seçti. Ancak, Decca örneğinde olduğu gibi, faz belirsizliğiyle ilgili sorun, sistemin o sırada pratik olmadığı anlamına geliyordu.
Faz kilitli döngünün LORAN-C'yi bir olasılık haline getirdiği yerde, Omega için bu, atalet navigasyon sistemleri (INS) bir çözüm önerdi - INS, alıcının hangi şeritte olduğu ile ilgili herhangi bir belirsizliği çözecek kadar doğruydu. Decca'nın neredeyse aynı DELRAC sistemini geliştirmesine paralel olarak deneyler 1950'ler ve 60'lar boyunca devam etti. Buzların kırıldığı 1960'lara kadar değildi. balistik denizaltılar böyle bir sisteme acil bir ihtiyaç olduğu için ana caydırıcı bir güç haline geldi. ABD Donanması 1968'de tam konuşlandırma yetkisi verdi ve 1983'te 8 istasyonluk tam bir sete ulaştı. Omega, 20 Eylül 1997'de kapatılan en kısa ömürlü sistemlerden biri olduğunu da kanıtlayacaktı.[13]
Omega istasyonları, belirli bir zaman diliminde sürekli bir dalga sinyali yayınlar. Dünya çapında dağıtılan istasyonlar için slotların kesin zamanlamasını sağlamak için, istasyonlar senkronize edilmiş atom saatleri. Bu saatler aynı zamanda sinyallerinin doğru frekans ve faz ile gönderilmesini sağlamış; Önceki sistemlerin aksine, saatler harici bir referans olmadan sinyalleri tetikleyecek kadar hassas olduğundan Omega'nın bir ana / ikincil düzenlemeye sahip olması gerekmiyordu. Sırayı başlatmak için, içindeki istasyon Norveç başlangıçta 10,2 kHz'de 0,9 saniye yayınlanır, ardından 0,2 saniye süreyle kapatılır, ardından 1,0 saniye süreyle 13,6 kHz'de yayınlanır vb. Her istasyon, her biri yaklaşık bir saniye süren bu tür dört sinyalden oluşan bir dizi yayınladı ve ardından diğer istasyonlar sırasını alırken sessizce durdu. Herhangi bir anda, üç istasyon aynı anda farklı frekanslarda yayın yapıyor olacaktı. Alıcılar, verilen konum için en uygun istasyon kümesini seçer ve ardından 10 saniyelik zincir sırasında bu istasyonlar için sinyallerin görünmesini bekler. Daha sonra düzeltmenin hesaplanması tam olarak Decca ile aynı şekilde ilerledi, ancak çok daha düşük çalışma frekansı çok daha az doğruluk sağladı. Omega'nın çizelgeleri 2 ila 4 deniz mili arasında doğruluk oranı verir.[13]
CHAYKA
CHAYKA, Sovyetler Birliği LORAN-C'nin karşılığıdır ve benzer prensipler ve aynı frekansta çalışır. Öncelikle darbeli zarfların ayrıntılarında farklılık gösterir. Eski Sovyetler Birliği çevresinde dağıtılmış beş CHAYKA zinciri var, her biri bir usta ve iki ila dört sekonder arasında.
Alfa
Daha doğru bir şekilde Sovyet adı olan RSDN-20 ile bilinen Alpha, esasen daha önce kullanılan Omega versiyonudur. Sovyetler Birliği 1962'de başladı. İlk sistem, daha sonra ana istasyon olan Krasnodar, Revda ve Novosibirsk'te kabaca bir hatta çalışan sadece üç verici kullanıyordu. 1991'de Habarovsk ve Seyda'da iki ek istasyon çevrimiçi oldu. İstasyonlar 11 ile 14 kHz arasındaki frekansları kullanır.[14]
Uydu navigasyon sistemleri için iki karmaşık faktör şunlardır: (1) verici istasyonları (uydular) hareket ediyor; ve (2) GPS uydu iletimleri, UTC ile (yayınlanmış bir sapma ile) senkronize edilir, böylece kesin zaman sağlanır. Madde (1), uydu koordinatlarının bir zaman fonksiyonu olarak bilinmesini gerektirir (yayın mesajlarına dahil). Öğe (2), satnav sistemlerinin konum bilgisinin yanı sıra zamanlama sağlamasına olanak tanır, ancak daha karmaşık bir çözüm algoritması gerektirir. Bununla birlikte, bunlar toprağa sabitlenmiş hiperbolik sistemlerden teknik farklılıklardır, ancak temel farklılıklar değildir.[15][16]
Ayrıca bakınız
Referanslar
- ^ "Ppm cinsinden saat doğruluğu"
- ^ Festschrift 175 Jahre Seefahrtschule Lübeck
- ^ Meldau-Bozkırları, Lehrbuch der Navigasyon, B.2, sayfa 7.142, Bremen 1958
- ^ a b c d Jerry Proc, "GEE sistemi", 14 Ocak 2001
- ^ a b c Jerry Proc, "LORAN-A", 26 Kasım 2007
- ^ a b c Jerry Proc, "Decca Navigator - Geçmiş", 14 Ocak 2008
- ^ Jerry Proc, "DECTRA", 20 Şubat 2001
- ^ Jerry Proc, "DELRAC", 26 Ocak 2008
- ^ a b Jerry Proc, "LORAN-C Tarihi", 21 Mart 2004
- ^ Jerry Proc, "LORAN-C Kapatma", 1 Eylül 2010
- ^ Jerry Proc, "LORAN-C Sinyal Karakteristikleri", 24 Eylül 2006
- ^ "LORAN'ın Kapatılmasına İlişkin Özel Bildirim", ABD Sahil Güvenlik, 8 Haziran 2012
- ^ a b Jerry Proc, "OMEGA", 21 Ekim 2010
- ^ Trond Jacobsen, "RUSYA VLF NAVAID SİSTEMİ, ALPHA, RSDN-20"
- ^ Abel, J.S. ve Chaffee, J.W., "GPS çözümlerinin varlığı ve benzersizliği", Havacılık ve Elektronik Sistemlerde IEEE İşlemleri, cilt. 26, hayır. 6, sayfa 748–53, Eylül 1991.
- ^ Fang, B.T., "J.S. Abel ve J.W. Chaffee'nin" GPS çözümlerinin varlığı ve benzersizliği "üzerine yorumlar", Havacılık ve Elektronik Sistemlerde IEEE İşlemleri, cilt. 28, hayır. 4, Ekim 1992.
| Yetki kontrolü |
|---|