ICub - iCub - Wikipedia
 | |
| Üretici firma | İtalyan Teknoloji Enstitüsü |
|---|---|
| Ülke | İtalya |
| Yaratılış yılı | 2009-günümüz |
| Tür | İnsansı robot |
| Amaç | araştırma, eğlence |
| İnternet sitesi | www |
| Geliştirici (ler) | İtalyan Teknoloji Enstitüsü |
|---|---|
| İlk sürüm | 2009 |
| Kararlı sürüm | 1.13.0 / 4 Temmuz 2019 |
| Yazılmış | C ++[1] |
| İşletim sistemi | Bedava / Libre işletim sistemleri: Linux, FreeBSD, NetBSD, OpenBSD; Özgür olmayan işletim sistemleri: OS X, pencereler |
| Tür | Yapay zeka, Robotik |
| Lisans | GNU GPL /GNU LGPL[2] (Ücretsiz yazılım ) |
| İnternet sitesi | github |
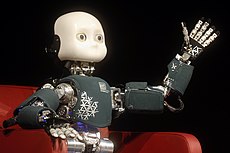
iCub 1 metre boyunda açık kaynak robotik insansı robot test ortamı insan bilişi ve yapay zeka üzerine araştırmalar için.
Tarafından tasarlandı RobotCub Konsorsiyumu birkaç Avrupa üniversitesinden ve İtalyan Teknoloji Enstitüsü ve şu anda gibi diğer projeler tarafından destekleniyor BEN KONUŞMAK.[3] Robot açık kaynak donanım tasarımı, yazılım ve belgelerle GPL lisansı. Adı kısmi bir kısaltmadır, yavru Bilişsel Evrensel Beden için duruyor. Proje için ilk finansman € 8.5 milyondan Birim E5 - Bilişsel Sistemler ve Robotik - Avrupa Komisyonu 's Yedinci Çerçeve Programı ve bu 1 Eylül 2004'ten 31 Ocak 2010'a kadar 65 ay sürdü.
Güçlü insansı tasarımın arkasındaki motivasyon, Somut biliş İnsan benzeri manipülasyonun insan bilişinin gelişiminde hayati bir rol oynadığı hipotezi. Bir bebek, çevresi ve diğer insanlarla uzuvlarını ve duyularını kullanarak etkileşime girerek birçok bilişsel beceriyi öğrenir ve sonuç olarak, dünyanın iç modeli büyük ölçüde insan vücudunun biçimi tarafından belirlenir. Robot, bilişsel öğrenme senaryolarının, algısal sistemin doğru bir şekilde yeniden üretilmesi ve küçük bir çocuğun eklemlenmesiyle gerçekleştirilmesine izin vererek bu hipotezi test etmek için tasarlandı, böylece böyle bir çocuğun yaptığı gibi dünyayla etkileşime girebilirdi.[4]
Teknik Özellikler

İCub'ın boyutları 3,5 yaşındaki bir çocuğunkine benzer. Robot, bir yerleşik tarafından kontrol edilir PC104 kullanarak aktüatörler ve sensörler ile iletişim kuran kontrolör CANBus.
El ve omuz için tendon tahrikli eklemleri kullanır, parmaklar tarafından bükülür. teflon teflon kaplı tüplerin içinde çalışan ve yay dönüşlerine karşı çeken kaplı kablo tendonları. Eklem açıları, özel tasarım kullanılarak ölçülür Salon etkisi sensörler ve robot tork sensörleri ile donatılabilir. Parmak uçları dokunsal dokunma sensörleri ile donatılabilir ve dağıtılmış bir kapasitif sensör cildi geliştirilmektedir.
Yazılım kitaplığı büyük ölçüde C ++ ile yazılmıştır ve YARP Geliştirilmesi RobotCub Konsorsiyumu tarafından devralınan üst düzey işlevselliği uygulayan yerleşik yazılımla Gigabit Ethernet üzerinden harici iletişim için.[4] Robot, otonom çalışma için tasarlanmadı ve sonuç olarak bunun için gerekli yerleşik piller veya işlemcilerle donatılmadı - bunun yerine göbek kablosu güç ve ağ bağlantısı sağlıyor.[4]
Son versiyonunda robot, 53 harekete geçirildi özgürlük derecesi aşağıdaki gibi organize edilmiştir:
- Her kolda 7
- Her elde 9'ar (başparmak için 3, indeks için 2, orta parmak için 2, bağlı halka ve küçük parmak için 1, addüksiyon / kaçırma için 1)
- 6 kafada (boyun için 3 ve kameralar için 3)
- Gövde / belde 3
- Her bacakta 6
Başta, gözlerin bir insan üzerinde konumlandırılacağı döner montajda stereo kameralar ve yanda mikrofonlar bulunur. Ayrıca yüz ifadeleri yapmak için yüz panelinin arkasına monte edilmiş ağız ve kaşları temsil eden kırmızı LED hatları vardır.
İlk robotların yapımından bu yana tasarım, örneğin daha küçük ve daha becerikli eller gibi çeşitli revizyonlar ve iyileştirmelerden geçti.[5] ve daha büyük eklem açılarına sahip ve sadece sürünmekten ziyade yürümeye izin veren daha hafif, daha sağlam bacaklar.[6]
İCub'ın yetenekleri

İCub, diğerlerinin yanı sıra aşağıdaki görevleri başarıyla gerçekleştirme yetenekleriyle kanıtlanmıştır:
- yerde optik işaretleyici ile görsel rehberlik kullanarak tarama[7]
- karmaşık 3B labirentleri çözme [8][9]
- okçuluk, yayla ok atma ve hedefin merkezine vurmayı öğrenme[10][11]
- iCub'ın duyguları ifade etmesine izin veren yüz ifadeleri[12]
- kuvvet kontrolü, proksimal kuvvet / tork sensörlerinden yararlanma[13]
- toplar, plastik şişeler vb. gibi küçük nesneleri kavramak[14]
- Statik olmayan ortamlarda çarpışmadan kaçınma ve kendi kendine çarpışmadan kaçınma[15][16][17]
Dünyadaki iCub'lar

Bu robotlar tarafından yapıldı Istituto Italiano di Tecnologia (IIT) içinde Cenova iCub'ı yapay sistemlerde somutlaşmış bilişi incelemek için kullanan küçük ama canlı bir bilim insanı topluluğu tarafından kullanılır. Başta şu ülkelerde olmak üzere çeşitli laboratuvarlarda yaklaşık otuz iCub vardır. Avrupa Birliği ama aynı zamanda Amerika Birleşik Devletleri'nde.[18] Kuzey Amerika'da iCub almaya hak kazanan ilk araştırmacı Stephen E. Levinson, beyin ve zihin ve dil ediniminin hesaplamalı modellerinin çalışmaları için.[19]
Robotlar HTE tarafından inşa edildi ve yaklaşık 250.000 € 'ya mal oldu[20] her biri sürüme bağlı olarak.[21]Mali desteğin çoğu, Avrupa Komisyonu'nun E5 Birimi'nden veya yakın zamanda oluşturulan iCub Tesisi departmanı aracılığıyla Istituto Italiano di Tecnologia'dan (IIT) geliyor.[18]IIT'de iCub'ın geliştirilmesi ve yapımı, adlı bağımsız bir belgesel filmin parçasıdır. Tak ve Dua Et 2010 yılında piyasaya sürüldü.[22]
Ayrıca bakınız
Referanslar
- ^ iCub Kaynak Kodu
- ^ "iCub". Alındı 27 Kasım 2019.
İCub, GPL / LGPL lisanslarının ardından Açık Kaynak olarak dağıtılır ve artık dünya çapında hevesli geliştiricilerden oluşan bir topluluğa güvenebilir.
- ^ "Açık kaynaklı bir bilişsel insansı robotik platform". Resmi iCub web sitesi. Alındı 30 Temmuz 2010.
- ^ a b c Metta, Giorgio; Sandini Giulio; Vernon David; Natale Lorenzo; Nori Francesco (2008). İCub insansı robot: somutlaşmış bilişte araştırma için açık bir platform (PDF). PerMIS’08. Alındı 1 Ocak 2018.
- ^ Haziran, Laura (12 Mart 2010). "iCub daha küçük eller, daha iyi bacaklar ile güncellenir". Engadget. Alındı 30 Temmuz 2010.
- ^ Tsagarakis, N.G .; Vanderborght Bram; Laffranchi Matteo; Caldwell D.G. Çocuk İnsansı robot 'iCub' için Yeni Alt Gövdenin Mekanik Tasarımı (PDF). IEEE Uluslararası Robotik ve Otomasyon Konferansı Konferansı, (ICRA 2009). Arşivlenen orijinal (PDF) 20 Temmuz 2011'de. Alındı 30 Temmuz 2010.
- ^ "https://www.youtube.com/watch?v=JRqdIFCIZd8". YouTube'da iCub tarama videosu. Alındı 19 Mart 2011. İçindeki harici bağlantı
| title =(Yardım) - ^ Nath, Vishnu; Stephen Levinson. Bir iCub İnsansı Robotla Hedeflere Ateş Etmeyi Öğrenme. AAAI Bahar Sempozyumu 2013: Akıllı Robotları Tasarlamak: Yapay Zekayı Yeniden Entegre Etmek II. Alındı 29 Eylül 2013.
- ^ "https://www.youtube.com/watch?v=78u8FkVc3Jc". YouTube'da iCub labirent çözme videosu. Alındı 29 Eylül 2013. İçindeki harici bağlantı
| title =(Yardım) - ^ Kormuşev, Petar; Calinon Sylvain; Saegusa Ryo; Metta Giorgio. İnsansı bir robot iCub ile okçuluk becerisini öğrenmek (PDF). IEEE Uluslararası İnsansı Robotlar Konferansı, (Humanoids 2010). Alındı 19 Mart 2011.
- ^ "https://www.youtube.com/watch?v=QCXvAqIDpIw". YouTube'da iCub okçuluk videosu. Alındı 19 Mart 2011. İçindeki harici bağlantı
| title =(Yardım) - ^ "https://www.youtube.com/watch?v=qsrs0e_9iX8". YouTube'da iCub yüz ifadeleri videosu. Alındı 19 Mart 2011. İçindeki harici bağlantı
| title =(Yardım) - ^ "https://www.youtube.com/watch?v=sUErJodlPtQ". YouTube'da iCub zorla kontrol videosu. Alındı 19 Mart 2011. İçindeki harici bağlantı
| title =(Yardım) - ^ "Akıllı İnsansılara Doğru". iCub çeşitli nesneleri yönetiyor. Arşivlenen orijinal 10 Mart 2014. Alındı 22 Temmuz 2013.
- ^ Frank, Mikhail; Jürgen Leitner; Marijn Stollenga; Gregor Kaufmann; Simon Harding; Alexander Förster; Jürgen Schmidhuber. İnsansı Hayvanlar ve Diğer Robotlar için Modüler Davranış Ortamı (MoBeE) (PDF). 9. Uluslararası Kontrol, Otomasyon ve Robotikte Bilişim Konferansı (ICINCO).
- ^ Leitner, Jürgen ‘Juxi’; Simon Harding; Mikhail Frank; Alexander Förster; Jürgen Schmidhuber. Paylaşılan Bir Çalışma Alanında Çalışan Robotlar Arasında Mekansal Algının Aktarılması (PDF). IEEE / RSJ Uluslararası Akıllı Robotlar ve Sistemler Konferansı (IROS 2012).
- ^ Stollenga, Marijn; Leo Pape; Mikhail Frank; Jürgen Leitner; Alexander Förster; Jürgen Schmidhuber. Görevle İlgili Yol Haritaları: İnsansı Hareket Planlaması için Bir Çerçeve. IEEE / RSJ Uluslararası Akıllı Robotlar ve Sistemler Konferansı (IROS 2013).
- ^ a b "İCub insansı robot projesi". Istituto Italiano di Tecnologia (IIT). Alındı 1 Ocak 2018.
- ^ "İnsansı Robot Çocuk Gibi Öğrenir". Keşif Haberleri. Alındı 11 Şubat 2013.
- ^ "XE: (EUR / USD) Euro - ABD Doları Kuru". www.xe.com. Alındı 20 Kasım 2015.
- ^ "http://www.icub.org/bazaar.php". iCub web sitesi. Alındı 30 Temmuz 2010. İçindeki harici bağlantı
| title =(Yardım) - ^ Tak ve Dua Et robotların sosyal etkisi ve ilgili etik sorular hakkında belgesel film
Dış bağlantılar
- Nosengo, Nicola (27 Ağustos 2009). "Robotik: Top oynayan robot" (PDF). Doğa. 460 (7259): 1076–8. doi:10.1038 / 4601076a. PMID 19713909. Alındı 30 Temmuz 2010. - iCub hakkında doğa makalesi.
- Youtube kanalı - iCub hakkında bir YouTube kanalı.
- iCub sunumları - Humanoid robotik sempozyumundan 2010.
- IROS'10 - iCub araştırması üzerine videolar ve atölye çalışması (2010).
- Akıllı İnsansılara Doğru - iCub'un mevcut yeteneklerini gösteren video (2012)
- RobotCub Konsorsiyumu
- iCub projesi
| Öncesinde RobotCub | İnsansı robotlar | tarafından başarıldı - |