Suurballes algoritması - Suurballes algorithm - Wikipedia
İçinde teorik bilgisayar bilimi ve ağ yönlendirme, Suurballe algoritması negatif olmayan ağırlıklı iki ayrık yolu bulmak için bir algoritmadır Yönlendirilmiş grafik, böylece her iki yol da aynı çift köşeler ve minimum toplam uzunluğa sahip.[1] Algoritma John W.Suurballe tarafından tasarlandı ve 1974'te yayınlandı.[2] Suurballe'nin algoritmasının ana fikri, Dijkstra algoritması bir yol bulmak, grafik kenarlarının ağırlıklarını değiştirmek ve ardından Dijkstra algoritmasını ikinci kez çalıştırmak. Algoritmanın çıktısı, bu iki yolun birleştirilmesi, yolların zıt yönlerde katedilen kenarların atılması ve kalan kenarların çıktı olarak geri dönmek için iki yolu oluşturmak için kullanılmasıyla oluşturulur. ağırlık modifikasyonu Johnson'ın algoritması ve ağırlıkların olumsuz olmamasını korurken Dijkstra algoritmasının ikinci örneğinin doğru ikinci yolu bulmasına izin verir.
Minimum ağırlıkta iki ayrık yol bulma sorunu, özel bir durum olarak görülebilir. minimum maliyet akışı sorun, bu durumda iki "akış" birimi olduğu ve düğümler birim "kapasiteye" sahip olduğu durumda. Suurballe'ın algoritması, aynı zamanda, mümkün olan maksimum akış miktarını en kısa artırma yolu boyunca tekrar tekrar iten bir minimum maliyetli akış algoritmasının özel bir durumu olarak da görülebilir. ) akış ve Suurballe algoritması tarafından bulunan ikinci yol, en kısa artırma yoludur. artık grafik ilk yol boyunca bir akış birimi ittikten sonra sola.
Tanımlar
İzin Vermek G köşe seti ile ağırlıklı yönlendirilmiş bir grafik olun V ve kenar seti E (Şekil A); İzin Vermek s belirlenmiş bir kaynak köşe olmak Gve izin ver t belirlenmiş bir hedef tepe noktası olabilir. Her kenara izin ver (sen,v) içinde E, tepe noktasından sen tepe noktasına v, negatif olmayan bir maliyeti var w(sen,v).
Tanımlamak d (s,sen) bedeli olmak en kısa yol tepe noktasına sen tepe noktasından s en kısa yol ağacında köklü s (Şekil C).
Not: Node ve Vertex genellikle birbirinin yerine kullanılır.
Algoritma
Suurballe'nin algoritması aşağıdaki adımları gerçekleştirir:
- En kısa yol ağacını bulun T düğümde köklü s Dijkstra algoritmasını çalıştırarak (şekil C). Bu ağaç her köşe için içerir senen kısa yol s -e sen. İzin Vermek P1 en kısa maliyet yolu olmak s -e t (Şekil B). Kenarlar T arandı ağaç kenarları ve kalan kenarlar (şekil C'de eksik olan kenarlar) olarak adlandırılır ağaç olmayan kenarlar.
- Maliyeti değiştirerek grafikteki her kenarın maliyetini değiştirin w(sen,v) her yönden (sen,v) tarafından w ′(sen,v) = w(sen,v) - d (s,v) + d (s,sen). Ortaya çıkan değiştirilmiş maliyet fonksiyonuna göre, tüm ağaç kenarlarının maliyeti 0'dır ve ağaç olmayan kenarların negatif olmayan bir maliyeti vardır. Örneğin:
Eğer sen= B, v= E, sonra w ′(sen,v) = w(B, E) - d (A, E) + d (A, B) = 2-3 + 1 = 0
Eğer sen= E, v= B, sonra w ′(sen,v) = w(E, B) - d (A, B) + d (A, E) = 2 - 1 + 3 = 4 - Kalan bir grafik oluşturun Gt oluşan G kenarlarını kaldırarak G yolda P1 yönlendirilen s ve sonra yol boyunca sıfır uzunluktaki kenarların yönünü tersine çevirin P1 (Şekil D).
- En kısa yolu bulun P2 kalıntı grafikte Gt Dijkstra algoritmasını çalıştırarak (şekil E).
- Ters kenarları atın. P2 her iki yoldan. Kalan kenarları P1 ve P2 iki çıkış kenarı olan bir alt grafik oluşturun s, iki gelen kenar tve kalan her köşede bir gelen ve bir giden kenar. Bu nedenle, bu alt grafik, iki kenardan ayrık yoldan oluşur. s -e t ve muhtemelen bazı ek (sıfır uzunluklu) döngüler. Alt grafikten iki ayrık yolu döndür.
Misal
Aşağıdaki örnek, Suurballe'ın algoritmasının en kısa ayrık yol çiftini nasıl bulduğunu gösterir. Bir -e F.
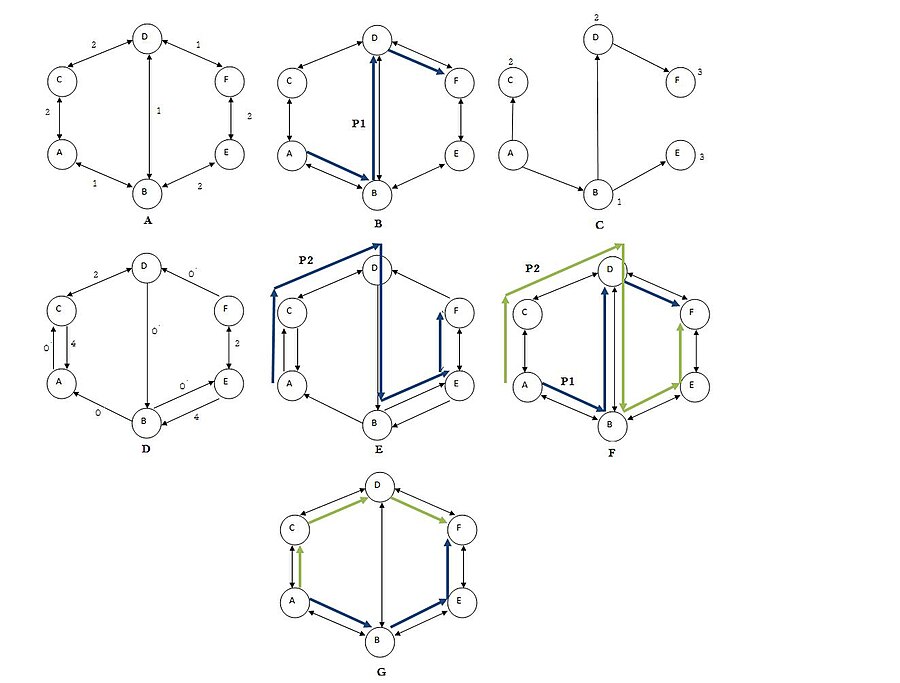
Figür Bir ağırlıklı bir grafiği gösterir G.
Figür B en kısa yolu hesaplar P1 itibaren Bir -e F (Bir–B–D–F).
Figür C en kısa yol ağacını gösterir T köklü Birve hesaplanan mesafeler Bir her köşeye (sen).
Figür D kalan grafiği gösterir Gt her kenarın güncellenmiş maliyeti ve 'P yolunun kenarları ile1 ters.
Figür E yolu hesaplar P2 kalıntı grafikte Gt (Bir–C–D–B–E–F).
Figür F her iki yolu da gösterir P1 ve yol P2.
Figür G yolların kenarlarını birleştirerek en kısa ayrık yol çiftini bulur P1 ve P2 ve sonra her iki yol arasındaki ortak ters kenarların atılması (B–D). Sonuç olarak, en kısa iki ayrık yol çiftini elde ederiz (Bir–B–E–F) ve (Bir–C–D–F).
Doğruluk
Herhangi bir yolun ağırlığı s -e t değiştirilmiş ağırlık sisteminde, orijinal grafikteki ağırlığa eşittir, eksi d (s,t). Bu nedenle, değiştirilmiş ağırlıklar altındaki en kısa iki ayrık yol, farklı ağırlıklara sahip olmalarına rağmen orijinal grafikteki en kısa iki yolla aynı yollardır.
Suurballe'ın algoritması, ardı ardına gelen en kısa yollar yönteminin özel bir durumu olarak görülebilir. minimum maliyet akışı toplam akış miktarı iki s -e t. Ağırlıkların değiştirilmesi, bu yöntemle bulunan yolların sırasını etkilemez, sadece ağırlıklarını etkiler. Bu nedenle, algoritmanın doğruluğu, ardışık en kısa yollar yönteminin doğruluğundan kaynaklanmaktadır.
Analiz ve çalışma süresi
Bu algoritma, Dijkstra algoritmasının iki yinelemesini gerektirir. Kullanma Fibonacci yığınları, her iki yineleme de zamanında gerçekleştirilebilir nerede ve sırasıyla köşe ve kenarların sayısıdır. Bu nedenle, aynı zaman sınırı Suurballe'nin algoritması için de geçerlidir.



Varyasyonlar
Suurballe algoritmasının yukarıda açıklandığı şekliyle sürümü, ayrık kenarlara sahip ancak köşeleri paylaşabilen yolları bulur. Köşe ayrık yolları bulmak için aynı algoritmayı kullanmak, her bir köşeyi bir çift bitişik köşeyle değiştirerek, biri tüm gelen bitişiklerle birlikte kullanmak mümkündür. u-in orijinal tepe noktasının ve tüm giden bitişiklerin bulunduğu u-çıkış. Bu değiştirilmiş grafikteki iki kenardan ayrık yol, zorunlu olarak orijinal grafikteki iki köşe ayrık yola karşılık gelir ve bunun tersi de geçerlidir; bu nedenle, değiştirilmiş grafiğe Suurballe'ın algoritmasının uygulanması, orijinal grafikte iki köşe ayrık yolun oluşturulmasıyla sonuçlanır. Suurballe'ın orijinal 1974 algoritması, sorunun köşe-ayrık versiyonu içindi ve 1984 yılında Suurballe ve Tarjan tarafından uç-ayrık versiyona genişletildi.[3]
Dijkstra algoritmasının her bir tepe noktasına olan mesafeleri eşzamanlı olarak hesaplayan değiştirilmiş bir sürümünü kullanarak t grafiklerde Gt, belirli bir kaynak tepe noktasından en kısa yol çiftlerinin toplam uzunluklarını bulmak da mümkündür. s Dijkstra algoritmasının tek bir örneğiyle orantılı olan bir süre içinde, grafikteki diğer tüm tepe noktalarına.
Not: Bölmeden kaynaklanan bitişik köşeler çifti, gelen köşeden giden köşeye sıfır maliyetli tek yönlü bir kenarla bağlanır. Kaynak köşe şu hale gelir: s-çıkış ve hedef tepe noktası olur teneke.
Ayrıca bakınız
Referanslar
- ^ Bhandari, Ramesh (1999), "Suurballe'ın ayrık çift algoritmaları", Sürdürülebilir Ağlar: Çeşitli Yönlendirme Algoritmaları, Springer-Verlag, s. 86–91, ISBN 978-0-7923-8381-9.
- ^ Suurballe, J. W. (1974), "Bir ağdaki ayrık yollar", Ağlar, 4 (2): 125–145, doi:10.1002 / net.3230040204.
- ^ Suurballe, J. W .; Tarjan, R. E. (1984), "En kısa ayrık yol çiftlerini bulmak için hızlı bir yöntem" (PDF), Ağlar, 14 (2): 325–336, doi:10.1002 / net. 3230140209.