Vektör kontrolü (motor) - Vector control (motor) - Wikipedia
Vektör kontrolü, olarak da adlandırılır alan odaklı kontrol (FOC), bir değişken frekanslı sürücü (VFD) kontrol yöntemi stator bir üç faz AC elektrik motoru bir vektör ile görselleştirilebilen iki ortogonal bileşen olarak tanımlanır. Bir bileşen motorun manyetik akısını, diğeri ise torku tanımlar. Sürücünün kontrol sistemi, sürücünün hız kontrolü tarafından verilen akı ve tork referanslarından karşılık gelen mevcut bileşen referanslarını hesaplar. Tipik orantılı integral (PI) kontrolörler Ölçülen akım bileşenlerini referans değerlerinde tutmak için kullanılır. darbe genişliği modülasyonu değişken frekanslı sürücünün transistör PI akım kontrolörlerinin çıkışı olan stator voltaj referanslarına göre anahtarlama.[1]
FOC kontrol etmek için kullanılır AC senkron ve asenkron motorlar.[2] Başlangıçta tümüyle sorunsuz çalışması gereken yüksek performanslı motor uygulamaları için geliştirilmiştir. hız aralık, tam oluştur tork sıfır hızda ve hızlı dahil yüksek dinamik performansa sahip hızlanma ve yavaşlama. Ancak, FOC'nin motor boyutu, maliyeti ve maliyeti nedeniyle düşük performanslı uygulamalar için de giderek daha cazip hale geliyor. güç tüketimi indirgeme üstünlüğü.[3][4] Mikroişlemcilerin artan hesaplama gücü ile sonuçta neredeyse evrensel olarak tek değişkenli skaler volt -başına-Hertz (V / f) kontrolü.[5][6]
Geliştirme geçmişi

Technische Universität Darmstadt'tan K. Hasse ve Siemens'ten F. Blaschke, vektör 1968'de ve 1970'lerin başında başlayan AC motorların kontrolü. Dolaylı vektör kontrolü önerme açısından Hasse, doğrudan vektör kontrolünü önerme açısından Blaschke.[7][8] Teknik Üniversite Braunschweig'den Werner Leonhard, FOC tekniklerini daha da geliştirdi ve aşağıdakiler için fırsatlar yaratmada etkili oldu: AC sürücüler rekabetçi bir alternatif olmak DC sürücüler.[9][10]
Yine de ticari hale gelene kadar değildi mikroişlemciler, yani 1980'lerin başında, genel amaçlı AC sürücüleri piyasaya çıktı.[11][12] AC sürücü uygulamaları için FOC kullanımının önündeki engeller, DC sürücülere kıyasla daha yüksek maliyet ve karmaşıklık ve daha düşük bakım kolaylığı içeriyordu; FOC, o zamana kadar sensörler, amplifikatörler ve benzeri konularda birçok elektronik bileşene ihtiyaç duyuyordu.[13]
Park dönüşümü analiz ve çalışmasında uzun süredir yaygın olarak kullanılmaktadır. senkron ve indüksiyon makineleri. Dönüşüm, FOC'nin nasıl çalıştığını anlamak için gereken en önemli kavramdır, kavram ilk olarak 1929 tarihli bir makale tarafından kavramsallaştırılmıştır. Robert H. Park.[14] Park'ın makalesi, yirminci yüzyılda şimdiye kadar yayınlanan elektrik mühendisliği ile ilgili tüm makaleler arasında etki açısından en önemli ikinci sırada yer aldı. Park'ın çalışmalarının yeniliği, ilgili herhangi bir makinenin doğrusal diferansiyel denklem zamanla değişen katsayılarla birinden diğerine zamanla ayarlanır değişmez katsayılar.[15]
Teknik Genel Bakış
Rakip VFD kontrol platformlarına genel bakış:
| VFD, sensörlü veya sensörsüz |
| |||||||||||||||||||||||||||
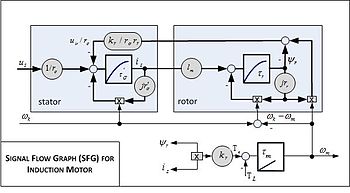



AC sürücü kontrollerinin analizi teknik olarak oldukça karmaşık olsa da ("Ayrıca bkz." Bölümü), bu tür bir analiz her zaman eşlik eden hatlar boyunca dahil edilen sürücü-motor devresinin modellenmesiyle başlar sinyal akış grafiği ve denklemler.[19]
Vektör kontrolünde, bir AC endüksiyon veya senkron motor, ayrı ayrı gibi tüm çalışma koşullarında kontrol edilir. uyarılmış DC motoru.[21] Yani, AC motor, içinde bir DC motor gibi davranır. alan akısı bağlantısı ve armatür İlgili alan ve armatür (veya tork bileşeni) akımları tarafından oluşturulan akı bağlantısı ortogonal olarak Tork kontrol edildiğinde alan akısı bağlantısı etkilenmeyecek ve dolayısıyla dinamik tork tepkisini sağlayacak şekilde hizalanmıştır.
Buna göre vektör kontrolü, üç fazlı bir PWM motor voltajı çıkışı bir karmaşık motorun üç fazlı stator akım girişinden türetilen karmaşık bir akım vektörünü kontrol etmek için voltaj vektörü projeksiyonlar veya rotasyonlar üç fazlı hız ve zamana bağlı sistem ile bu vektörlerin dönen referans çerçevesi iki arasında ileri gerikoordinat zamanla değişmeyen sistem.[22]
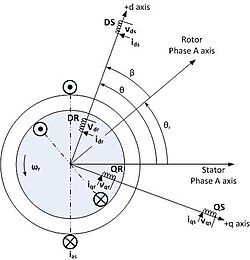
Böyle karmaşık stator mevcut uzay vektörü, d (doğrudan) ve q (kareleme) eksenleri boyunca ortogonal bileşenlere sahip bir (d, q) koordinat sisteminde tanımlanabilir, öyle ki akımın alan akısı bağlantı bileşeni d ekseni boyunca hizalanır ve akımın tork bileşeni hizalanır q ekseni boyunca.[21] Endüksiyon motorunun (d, q) koordinat sistemi, motorun anlık (a, b, c) üç fazına eklenebilir. sinüzoidal sisteme eşlik eden resimde gösterildiği gibi (açıklık için b & c aşamaları gösterilmemiştir). (D, q) sistem akım vektörünün bileşenleri, orantılı ve integral gibi geleneksel kontrole izin verir veya PI, kontrol DC motorda olduğu gibi.
(D, q) koordinat sistemiyle ilişkili tahminler tipik olarak şunları içerir:[19][22][23]
- Anlık akımlardan (a, b, c) kompleksine ileri projeksiyon stator üç fazın mevcut uzay vektörü gösterimi sinüzoidal sistemi.
- Üçten ikiye fazı ileri, (a, b, c) -to- (,) kullanarak projeksiyon Clarke dönüşüm. Vektör kontrol uygulamaları genellikle, sadece iki motor akım fazının algılanması gerekecek şekilde, dengeli üç fazlı akımlara sahip topraklanmamış motoru varsayar. Ayrıca geriye doğru ikiden üçe faz, (,) -to- (a, b, c) projeksiyonu, uzay vektörü PWM modülatörünü veya ters Clarke dönüşümünü ve diğer PWM modülatörlerinden birini kullanır.
- İleri ve geri ikiden ikiye faz, (,) -to- (d, q) ve (d, q) -to- (,) sırasıyla Park ve ters Park dönüşümlerini kullanan projeksiyonlar.


Bununla birlikte, kaynakların üçe-ikiye, (a, b, c) -to- (d, q) ve ters projeksiyonlar kullanması alışılmadık bir durum değildir.
(D, q) koordinat sistemi dönüşü rastgele herhangi bir hıza ayarlanabilirken, tercih edilen üç hız veya referans çerçevesi vardır:[16]
- (D, q) koordinat sisteminin dönmediği sabit referans çerçevesi;
- (D, q) koordinat sisteminin senkron hızda döndüğü, senkronize olarak dönen referans çerçevesi;
- (D, q) koordinat sisteminin rotor hızında döndüğü rotor referans çerçevesi.
Ayrılmış Tork ve alan akımları bu nedenle kontrol algoritması geliştirme için ham stator akım girişlerinden türetilebilir.[24]
DC motorlardaki manyetik alan ve tork bileşenleri, ilgili alan ve armatür akımlarını ayrı ayrı kontrol ederek nispeten basit bir şekilde çalıştırılabilirken, değişken hızlı uygulamada AC motorların ekonomik kontrolü, mikroişlemci tabanlı kontrollerin geliştirilmesini gerektirmiştir.[24] tüm AC sürücülerle artık güçlü DSP (dijital sinyal işleme ) teknoloji.[25]
İnvertörler şu şekilde uygulanabilir: açık döngü sensörsüz veya kapalı döngü FOC, açık döngü çalışmasının temel sınırlaması,% 100 torkta mümkün olan minimum hızdır, yani kapalı döngü çalışma için durma ile karşılaştırıldığında yaklaşık 0,8 Hz.[9]
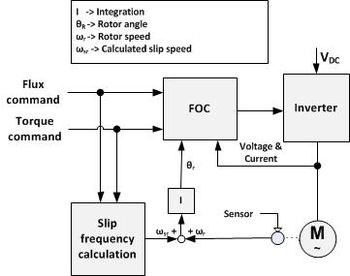
İki vektör kontrol yöntemi vardır, doğrudan veya geri bildirim vektör kontrolü (DFOC) ve dolaylı veya ileri besleme vektör kontrolü (IFOC), IFOC daha yaygın olarak kullanılmaktadır çünkü kapalı döngü modunda bu tür sürücüler sıfır hızdan yüksek hızlı alan zayıflatmaya kadar olan hız aralığı boyunca daha kolay çalışır.[26] DFOC'ta, akı büyüklüğü ve açı geri besleme sinyalleri, sözde gerilim veya akım modelleri kullanılarak doğrudan hesaplanır. IFOC'ta, akı alanı ileri besleme açısı ve akı büyüklüğü sinyalleri ilk olarak stator akımlarını ölçer ve rotor daha sonra rotor hızına karşılık gelen rotor açısını ve hesaplanan referans değerini toplayarak akı alanı açısını uygun şekilde türetmek için hız kayma kayma frekansına karşılık gelen açı.[27][28]
AC sürücülerin sensörsüz kontrolü (bkz. Sensörsüz FOC Blok Şeması), maliyet ve güvenilirlik açısından caziptir. Sensörsüz kontrol, açık döngü tahmin ediciler veya kapalı döngü gözlemcilerle birlikte ölçülen stator voltajı ve akımlarından rotor hızı bilgisinin türetilmesini gerektirir.[19][20]
Uygulama
1. Stator faz akımları ölçülür, (a, b, c) koordinat sisteminde karmaşık uzay vektörüne dönüştürülür.
2. Akım (, ) koordinat sistemi. Bir koordinat sistemine dönüştürüldü içinde dönen rotor referans çerçevesi, rotor konumu şu şekilde elde edilir entegre vasıtasıyla hız hız ölçümü sensörü.
3. Rotor akı bağlantısı vektör, stator akım vektörünü mıknatıslayıcı endüktans L ile çarparak tahmin edilirm ve alçak geçiren filtreleme rotor yüksüz durumdaki sonuç zaman sabiti Lr/ Rryani rotor endüktansının rotor direncine oranı.
4. Mevcut vektör, (d, q) koordinat sistemine dönüştürülür.
5. Stator akım vektörünün d ekseni bileşeni rotor akı bağlantısını kontrol etmek için kullanılır ve hayali q ekseni bileşeni motor torkunu kontrol etmek için kullanılır. PI kontrolörleri bu akımları kontrol etmek için kullanılabilirken, bang-bang tip akım kontrolü daha iyi dinamik performans sağlar.
6. PI denetleyicileri (d, q) koordinat voltajı bileşenleri sağlar. Çapraz bağlamayı veya hız, akım ve akı bağlantısındaki büyük ve hızlı değişiklikleri azaltmak için kontrol performansını iyileştirmek için bazen kontrolör çıkışına bir ayırma terimi eklenir. PI denetleyicisi ayrıca bazen alçak geçiren filtreleme giriş veya çıkışta, transistör anahtarlamasından kaynaklanan akım dalgalanmasının aşırı derecede yükseltilmesini ve kontrolü dengesizleştirmesini önlemek için. Bununla birlikte, bu tür filtreleme, dinamik kontrol sistemi performansını da sınırlar. Servo sürücüler gibi yüksek performanslı sürücüler için filtreleme gereksinimlerini en aza indirmek için tipik olarak yüksek anahtarlama frekansı (tipik olarak 10 kHz'den fazla) gereklidir.
7. Gerilim bileşenleri (d, q) koordinat sisteminden (, ) koordinat sistemi.
8. Gerilim bileşenleri (, ) sistemi (a, b, c) koordinat sistemine koordine et veya Darbe Genişliği Modülasyonu (PWM) güç çevirici bölümüne sinyal vermek için modülatör veya her ikisi.
Vektör kontrol uygulamasının önemli yönleri:
- Hız veya konum ölçümü veya bir tür tahmin gereklidir.
- Referanslar değiştirilerek tork ve akı, 5-10 milisaniyeden daha kısa bir sürede makul derecede hızlı bir şekilde değiştirilebilir.
- adım yanıtı Biraz var aşmak PI kontrolü kullanılıyorsa.
- Transistörlerin anahtarlama frekansı genellikle sabittir ve modülatör tarafından ayarlanır.
- Torkun doğruluğu, kontrolde kullanılan motor parametrelerinin doğruluğuna bağlıdır. Bu nedenle, örneğin rotor sıcaklığı değişikliklerinden kaynaklanan büyük hatalarla sıklıkla karşılaşılır.
- Makul işlemci performansı gereklidir; tipik olarak kontrol algoritması her PWM döngüsünde hesaplanır.
Vektör kontrol algoritması, Doğrudan Tork Kontrolü (DTC), algoritmanın DTC algoritması kadar sık hesaplanmasına gerek yoktur. Ayrıca mevcut sensörlerin piyasadaki en iyisi olmasına gerek yoktur. Böylece işlemcinin ve diğer kontrol donanımının maliyeti daha düşüktür ve bu da onu DTC'nin nihai performansının gerekli olmadığı uygulamalar için uygun hale getirir.
Ayrıca bakınız
- dönüştürmek
- Uyarlanabilir kontrol
- Kontrol Mühendisliği
- Kontrol teorisi
- Dqo dönüşümü
- Özdeğerler ve özvektörler
- Genişletilmiş Kalman filtresi
- Filtre (sinyal işleme)
- Frekans tepkisi
- Hilbert dönüşümü
- Dürtü yanıtı
- Kalman filtresi
- Sağlam kontrol
- Yol tarifi
- Pertürbasyon teorisi
- Sinyal akış grafiği
- Küçük sinyal modeli
- Kayar mod kontrolü
- Devlet gözlemcisi
- Durum uzayı gösterimi
- Simetrik bileşenler
- Sistem Analizi
- Geçici tepki
- Transfer işlevi

Referanslar
- ^ Zambada, Jorge (8 Kasım 2007). "Motorlar için alan odaklı kontrol". MachineDesign.com. Arşivlenen orijinal 16 Şubat 2013.
- ^ Lewin, Chuck (10 Nisan 2006). "Komutasyon ve Motor Kontrol Tekniklerinde Yeni Gelişmeler". DesignNews.com. Arşivlenen orijinal 21 Haziran 2007. Alındı 22 Nisan, 2012.
- ^ a b 568000 DSP Kılavuzu (2007). "Tek Şönt Akım Algılamalı 3 Fazlı AC İndüksiyon Vektör Kontrol Sürücüsü" (PDF). Freescale. s. 25, dahil özellikle eq. 2–37. Alındı 16 Mayıs 2012.
- ^ Godbole, Kedar (23 Eylül 2006). "Alan odaklı kontrol, endüstriyel uygulamalarda motor boyutunu, maliyeti ve güç tüketimini azaltır". Texas Instruments.
- ^ Bose, Bimal K. (Haziran 2009). "Güç Elektroniğinin Geçmişi, Bugünü ve Geleceği". IEEE Endüstriyel Elektronik Dergisi. 3 (2): 11. doi:10.1109 / MIE.2009.932709.
- ^ Murray, Aengus (27 Eylül 2007). "Dönüşüm hareketi: AC motorların alan odaklı kontrolü". EDN. Alındı 9 Mayıs 2017.
- ^ Yano, Masao; et al. "Japonya'daki Motor Sürücüleri için Güç Elektroniğinin Tarihi" (PDF). s. 6, Şekil 13. Alındı 18 Nisan 2012.
- ^ Rafiq, Md Abdur (2006). "Adaptif Sinir İndikatörü ile Asenkron Motor Sürücüsünün Hızlı Hızlı Tepki Alan Yönlendirme Kontrolü". İstanbul Üniversitesi Elektrik Elektronik Mühendisliği Dergisi. 6 (2): 229.
- ^ a b c Drury, Bill (2009). Control Techniques Sürücüler ve Kontroller El Kitabı (2. baskı). Stevenage, Herts, UK: Institute of Engineering and Technology. s. xxx. ISBN 978-1-84919-101-2.
- ^ Bose, Bimal K. (2006). Güç Elektroniği ve Motor Sürücüleri: Gelişmeler ve Trendler. Amsterdam: Akademik. s. 22. ISBN 978-0-12-088405-6.
- ^ "Vektör Kontrol Sürücüsünün Geliştirilmesi".
- ^ Bose (2006), s. 605
- ^ Gabriel, R .; Leonhard, W .; Nordby, C.J. (Mart – Nisan 1980). "Mikroişlemciler Kullanan Standart AC Motorların Alan Odaklı Kontrolü". Trans. Endüstri Uygulamaları Üzerine. IA-16 (2): 188. doi:10.1109 / tia.1980.4503770. S2CID 14562471.
- ^ Park, Robert (1929). "Senkron Makinelerin İki Reaksiyon Teorisi". Trans. AIEE. 48: 716–730. doi:10.1109 / t-aiee.1929.5055275. S2CID 51643456.
- ^ Heydt, G. T .; Venkata, S. S .; Balijepalli, N. (23–24 Ekim 2000). "Güç Mühendisliğinde Yüksek Etkili Belgeler, 1900-1999" (PDF). Kuzey Amerika Güç Sempozyumu (NAPS) 2000: P-1'den P-7'ye. Alındı 23 Mayıs 2012.
- ^ a b Lee, R. J .; Pillay, P .; Harley R. G. (1984). "Asenkron Motorların Simülasyonu için D, Q Referans Çerçeveleri" (PDF). Elektrik Güç Sistemleri Araştırması. EPR. 8: 15–26. doi:10.1016/0378-7796(84)90030-0.
- ^ Ross, Dave; et al. (2004). "Bir ACIM'nin Vektör Kontrolü için dsPIC30F'yi Kullanma" (PDF). Mikroçip. Alındı 16 Mayıs 2012.
- ^ Popescu, Mircea (2000). Vektör Kontrol Amaçlı Asenkron Motor Modellemesi (PDF). Espoo: Helsinki Teknoloji Üniversitesi. s. 13–14. ISBN 951-22-5219-8.
- ^ a b c d Holtz, J. (Ağu 2002). "Asenkron motor sürücülerinin sensörsüz kontrolü" (PDF). IEEE'nin tutanakları. 90 (8): 1359–1394. doi:10.1109 / jproc.2002.800726. Alındı 3 Haziran 2012.
- ^ a b Zambada, Jorge. "FOC Sensörsüz Motor Kontrolünün Faydaları". Appliance Dergisi. Alındı 3 Haziran 2012.
- ^ a b Bose (2006), s. 429
- ^ a b TI (1997). "3 Fazlı AC Motorların Alan Odaklı Kontrolü" (PDF). TI.
- ^ Didier, Jean-Louis. "Dönüşüm des systèmes triphasés Fortescue, Clarke, Park et Ku". Arşivlenen orijinal 7 Nisan 2014. Alındı 4 Haziran 2012.
- ^ a b Sinha, Naresh Kumar (1986). Mikroişlemci tabanlı kontrol sistemleri. D. Reidel Yayıncılık. s. 161 ve 175. ISBN 90-277-2287-0.
- ^ Bose (2006), s. 474
- ^ Bose (2006), s. 419, 474
- ^ Bose (2006), s. 423-425
- ^ Dong, Gan (Aralık 2007). "İlgili Dönüştürücü PWM Modülasyon Şemaları ile Sensörsüz ve Verimliliği Optimize Edilmiş Endüksiyon Makinesi Kontrolü" (PDF). Tennessee Teknoloji Üniversitesi. s. 10. Alındı 16 Mayıs 2012.