Sanal fikstür - Virtual fixture
Bir sanal fikstür hem doğrudan hem de insan performansını iyileştirmek için bir kullanıcının gerçek bir çevre algısı üzerine artırılmış duyusal bilgilerin bir katmanıdır. uzaktan manipüle edilmiş görevler. 1990'ların başında tarafından geliştirildi Louis Rosenberg -de ABD Hava Kuvvetleri Araştırma Laboratuvarı (AFRL), Virtual Fixtures, sanal gerçeklik ve arttırılmış gerçeklik teknolojileri.
Tarih

Sanal Fikstür ilk olarak Louis Rosenberg 1992'de USAF Armstrong Labs, sonuçta ilk sürükleyici arttırılmış gerçeklik sistem şimdiye kadar inşa edildi.[1][2][3][4][5] 3D grafikler 1990'ların başında fotogerçekçi ve uzamsal olarak kaydedilmiş artırılmış bir gerçeklik sunmak için çok yavaş olduğundan, Virtual Fixtures, kullanıcı tarafından giyilen tam bir üst vücut dış iskeleti tarafından kontrol edilen iki gerçek fiziksel robot kullandı. Kullanıcı için sürükleyici bir deneyim yaratmak için, kullanıcının robot kollarına ilişkin görüşünün kullanıcının gerçek fiziksel kollarının tam konumunda kayıtlı görünmesi için hizalanmış bir çift dürbün büyüteci içeren benzersiz bir optik konfigürasyon kullanıldı. .[1][6][4] Sonuç, kullanıcının kollarını hareket ettirirken, kollarının olması gereken yerde robot kollarını gördüğü mekansal olarak kaydedilmiş sürükleyici bir deneyim oldu. Sistem ayrıca, gerçek fiziksel görevleri yerine getirirken kullanıcıya yardımcı olmak için tasarlanmış, simüle edilmiş fiziksel engeller, alanlar ve kılavuzlar şeklinde bilgisayar tarafından oluşturulan sanal kaplamalar kullandı.[7][2]
Fitts Hukuku performans testi, insan test deneklerinin pilleri üzerinde gerçekleştirildi ve ilk kez, kullanıcılara kapsamlı artırılmış gerçeklik katmanları sağlayarak gerçek dünyadaki hünerli görevlerin insan performansında önemli bir artış elde edilebileceğini gösterdi.[4][8]
Konsept

Sanal armatür kavramı ilk olarak Rosenberg (1992) tarafından tanıtıldı[1] doğrudan ve uzaktan manipüle edilen görevlerde insan performansını iyileştirmek için bir çalışma alanında sanal duyusal bilgilerin bir katmanı olarak. Sanal duyusal katmanlar, kullanıcı tarafından gerçek çalışma alanı ortamında tam olarak mevcut olarak algılanacak şekilde uzayda kayıtlı fiziksel olarak gerçekçi yapılar olarak sunulabilir. Sanal duyusal katmanlar, gerçek fiziksel yapıların mümkün olmadığı özelliklere sahip soyutlamalar da olabilir. Duyusal katmanlar kavramını görselleştirmek ve hakkında konuşmak zordur, sonuç olarak sanal fikstür metaforu tanıtılmıştır. Sanal bir fikstürün ne olduğunu anlamak için, bir cetvel gibi gerçek bir fiziksel fikstür ile bir analoji sıklıkla kullanılır. Bir kağıt parçasına düz bir çizgi çizmek gibi basit bir görev, çoğu insanın iyi bir doğruluk ve yüksek hızda gerçekleştiremediği bir görevdir. Bununla birlikte, cetvel gibi basit bir cihazın kullanılması, görevin hızlı ve doğru bir şekilde gerçekleştirilmesine izin verir. Cetvelin kullanılması, cetvel boyunca kalemi yönlendirerek kullanıcıya yardımcı olur, kullanıcının titremesini ve zihinsel yükünü azaltır, böylece sonuçların kalitesini artırır.
Sanal Fikstür konsepti, Rosenberg tarafından 1991 yılında ABD Hava Kuvvetlerine önerildiğinde, artırılmış cerrahi, fikri gerçek bir kaleme kılavuzluk eden sanal bir cetvelden, gerçek bir fiziksel neşterin manipüle ettiği gerçek bir fiziksel neşterine rehberlik eden sanal bir tıbbi armatüre genişleten örnek bir kullanım durumuydu. gerçek cerrah.[1] Amaç, cerrahın gerçek çalışma alanını doğrudan algılaması üzerine, cerrahi ortama otantik eklemeler olarak algılanacak yeterli gerçekçilikle sanal içeriği kaplamak ve böylece cerrahi beceriyi, el becerisini ve performansı arttırmaktı. Sanal tıbbi armatürlerin gerçek donanıma kıyasla önerilen bir yararı, ortam gerçekliğine sanal eklemeler oldukları için, maruz kalmayan dokularda kılavuzluk ve / veya bariyerler sağlayarak gerçek hastaların içine kısmen daldırılabilmeleriydi.[9][1]
Rosenberg tarafından sanal armatürlerin tanımı[1][6][7] basitçe son efektörün rehberliğini sağlamaktan çok daha geniştir. Örneğin, işitsel sanal armatürler, son efektörün lokalizasyonu için çok modlu ipuçları sağlayarak kullanıcıya yardımcı olan sesli ipuçları sağlayarak kullanıcı farkındalığını artırmak için kullanılır. Rosenberg, sanal armatürlerin başarısının yalnızca kullanıcıya armatür tarafından yönlendirilmesinden değil, aynı zamanda kullanıcının uzak çalışma alanında daha büyük bir mevcudiyet ve daha iyi yerelleştirme deneyimlemesinden kaynaklandığını savunuyor. Bununla birlikte, insan-makine işbirliğine dayalı sistemler bağlamında, sanal armatürler terimi genellikle gerçek bir ortama yerleştirilen ve kullanıcının hareketini istenen yönler boyunca yönlendirirken istenmeyen yönlerde veya bölgelerde hareketi önleyen göreve bağlı bir sanal yardıma atıfta bulunmak için kullanılır. çalışma alanı. Bu, bu makalenin sonraki bölümünde ayrıntılı olarak açıklanan sanal fikstür türüdür.
Sanal armatürler şunlar olabilir: sanal armatürlere rehberlik etmek veya yasak bölgeler sanal armatürler. Yasaklanmış bölgeler sanal fikstürü, örneğin bir uzaktan kumandalı Operatörün bir hedefi gerçekleştirmek için uzak bir alanda bir aracı sürmesi gereken yeri ayarlamak. Uzak bölgede aracın yasak bölgelere düşmesine zarar verebilecek çukurlar varsa çeşitli çukur konumlarında tanımlanarak operatörün aracın böyle bir çukura düşmesine neden olacak komutlar vermesi engellenebilir.
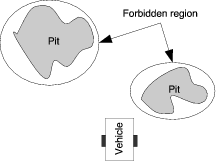
Bu tür yasadışı komutlar, bir operatör tarafından, örneğin gecikmeler nedeniyle kolayca gönderilebilir. teleoperasyon döngü, zayıf telepresence veya bir dizi başka neden.
Yol gösterici bir sanal fikstür örneği, aracın belirli bir yörüngeyi izlemesi gerektiğinde,

Operatör daha sonra ilerlemeyi kontrol edebilir. tercih edilen yön boyunca hareket ederken tercih edilmeyen yön kısıtlanmıştır.
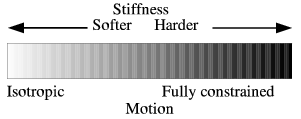
Hem yasak bölgeler hem de yönlendirici sanal armatürler ile sertlikveya tersi uyma, fikstürün ayarlanabilir. Uyum yüksekse (düşük sertlik), fikstür yumuşak. Öte yandan, uyum sıfır olduğunda (maksimum sertlik) fikstür zor.
Sanal fikstür kontrol yasası
Bu bölümde, sanal armatürleri uygulayan bir kontrol yasasının nasıl türetilebileceği açıklanmaktadır. Robotun, son efektör pozisyonuna sahip tamamen kinematik bir cihaz olduğu varsayılmaktadır. ve son efektör oryantasyonu robotun temel çerçevesinde ifade edilir . Giriş kontrol sinyali robota istenen bir son efektör hızı olduğu varsayılır . Tele-çalışan bir sistemde, giriş hızını operatörden ölçeklemek genellikle yararlıdır, robot kumandasına beslemeden önce. Kullanıcıdan gelen girdi, kuvvet veya konum gibi başka bir biçimde ise, ilk önce örneğin ölçeklendirme veya farklılaştırma yoluyla bir giriş hızına dönüştürülmelidir.
![{displaystyle mathbf {p} = sol [x, y, zight]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/96535791dbff9edd1c97cd7159bf4dd9983516d7)
![{displaystyle mathbf {r} = sol [r_ {extrm {x}}, r_ {extrm {y}}, r_ {extrm {z}} ight]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/51f2ce0e1c1a6a89f81d0bde14bc814fdbd89203)


![{displaystyle mathbf {v} = {dot {mathbf {x}}} = sol [{dot {mathbf {p}}}, {dot {mathbf {r}}} ight]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/901efddc4fbd62de1cb7b3bfe38abc14a6414d3f)

Böylece kontrol sinyali operatörün giriş hızından hesaplanacaktır gibi:

Eğer operatör ve yardımcı robot arasında bire bir eşleştirme vardır.

Sabit ise köşegen bir matris ile değiştirilir uyumluluğun farklı boyutları için bağımsız olarak ayarlamak mümkündür. . Örneğin, ilk üç öğeyi köşegenine ayarlamak -e ve diğer tüm elemanlar sıfıra, yalnızca öteleme hareketine izin veren ve dönüşe izin veren bir sistemle sonuçlanacaktır. Bu, hareketi kısıtlayan sert bir sanal fikstür örneği olacaktır. -e . Köşegen üzerindeki elemanların geri kalanı sıfır yerine küçük bir değere ayarlandıysa, fikstür yumuşak olacak ve dönme yönlerinde bir miktar harekete izin verecektir.





Daha genel kısıtlamaları ifade etmek için zamanla değişen bir matris varsayalım o anda tercih edilen yönü temsil eden . Böylece eğer tercih edilen yön, bir eğri boyunca . Aynı şekilde, bir yüzeye yayılan tercih edilen yönleri verir. Nereden iki projeksiyon operatörü tanımlanabilir,[10] sütun uzayının aralığı ve çekirdeği:
![{displaystyle mathbf {D} (t) matematikte {R} ^ {6 imes n}, ~ nin [1..6]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d2e6e2ff7d51e12b2d63bf3a7970dd45dc49157a)





![{displaystyle {egin {align} {extrm {Span}} (mathbf {D}) & equiv left [mathbf {D} ight] = mathbf {D} (mathbf {D} ^ {T} mathbf {D}) ^ {- 1} mathbf {D} ^ {T} {extrm {Kernel}} (mathbf {D}) & equiv langle mathbf {D} angle = mathbf {I} -left [mathbf {D} ight] end {align}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5414a2f8c7a2288013fc3ff61d72cfd9eaf78179)
Eğer tam sütun derecesine sahip değil, aralık hesaplanamıyor, dolayısıyla sözde tersi kullanarak aralığı hesaplamak daha iyidir,[10] bu nedenle pratikte aralık şu şekilde hesaplanır:
![{displaystyle {extrm {Span}} (mathbf {D}) equiv left [mathbf {D} ight] = mathbf {D} (mathbf {D} ^ {T} mathbf {D}) ^ {dagger} mathbf {D} ^ {T}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6f17473d67e794db5ff5ead848d6cff1f5a681fb)
nerede sözde tersini gösterir .

Giriş hızı şu şekilde iki bileşene ayrılır:
![{displaystyle mathbf {v} _ {extrm {D}} equiv left [mathbf {D} ight] mathbf {v} _ {extrm {op}} {extrm {~ ve ~}} mathbf {v} _ {au} equiv mathbf {v} _ {extrm {op}} - mathbf {v} _ {extrm {D}} = langle mathbf {D} açı mathbf {v} _ {extrm {op}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2befafa8da291bab77720a9006c89dde5233f46e)
kontrol yasasını şu şekilde yeniden yazmak mümkündür:

Ardından, hız girişinin yalnızca tercih edilmeyen bileşenini etkileyen yeni bir uyumluluk getirin ve son kontrol yasasını şu şekilde yazın:
![{displaystyle mathbf {v} = yarık (mathbf {v} _ {extrm {D}} + c_ {au} cdot mathbf {v} _ {au} ight) = yarık (sol [mathbf {D} ight] + c_ { au} langle mathbf {D} açı ight) mathbf {v} _ {extrm {op}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/225c46a7bc10d7cd8ad29b88995d93dac6654026)
Referanslar
- ^ a b c d e f L. B. Rosenberg (1992). "Uzak Ortamlarda Operatör Performansını Artırmak İçin Algısal Kaplamalar Olarak Sanal Fikstürlerin Kullanımı" (PDF). Teknik Rapor AL-TR-0089. Wright-Patterson AFB OH: USAF Armstrong Laboratuvarı.
- ^ a b Rosenberg, L.B. (1993). Sanal fikstürler: Telerobotik manipülasyon için algısal araçlar. IEEE. doi:10.1109 / vrais.1993.380795. ISBN 0-7803-1363-1.
- ^ Rosenberg, Louis (1993). "Zaman gecikmeli telemanipülasyonu geliştirmek için sanal armatürlerin kullanılması". Robotik, Mekatronik ve Haptik Arayüzlerdeki Gelişmeler üzerine ASME Kış Yıllık Toplantısı Bildirileri. New Orleans, LA. 49: 29–36.
- ^ a b c Rosenberg, Louis (1993). "Zaman gecikmeli teleoperasyonda operatör performansını artırmak için sanal armatürlerin kullanılması" (PDF). J. Dyn. Syst. Kontrol. 49: 29–36.
- ^ Noer, Michael (1998-09-21). "Masaüstü parmak izleri". Forbes. Alındı 22 Nisan 2014.
- ^ a b Rosenberg, L. (1993). "Telepresence ortamlarında operatör performansını artırmak için araçlar olarak sanal armatürler". SPIE Manipulator Teknolojisi. 2057: 10. Bibcode:1993SPIE.2057 ... 10R. doi:10.1117/12.164901.
- ^ a b Rosenberg (1994). "Sanal Haptik Kaplamalar Telepresence Görevlerinde Performansı Artırır". Telemanipulator ve Telepresence Teknolojileri. doi:10.1117/12.197302.
- ^ Rosenberg, Louis B. (1993). "Telepresence ortamlarında operatör performansını artırmak için araçlar olarak sanal armatürler". Telemanipulator Teknolojisi ve Space Telerobotics. 2057: 10–21. Bibcode:1993SPIE.2057 ... 10R. doi:10.1117/12.164901.
- ^ Rosenberg, L.B. (1992). "Operatör Performansını Artırmak İçin Algısal Kaplamalar Olarak Sanal Fikstürlerin Kullanımı" Stanford Üniversitesi, Stanford CA, Tasarım Araştırma Merkezi (CDR)
- ^ a b Marayong, P .; Okamura, A.M .; Hager, G.D. (2003). Uzamsal hareket kısıtlamaları: sanal fikstürler kullanarak robot rehberliği için teori ve gösteriler. IEEE. s. 1270–1275. doi:10.1109 / robot.2003.1241880. ISBN 0-7803-7736-2.