Telerobotics - Telerobotics
Bu makale için ek alıntılara ihtiyaç var doğrulama. (Ocak 2013) (Bu şablon mesajını nasıl ve ne zaman kaldıracağınızı öğrenin) |

Telerobotics alanı robotik yarı otonom robotların uzaktan kontrolü ile ilgilenen, özellikle Kablosuz ağ (sevmek Wifi, Bluetooth, Derin Uzay Ağı ve benzeri) veya bağlı bağlantılar. İki ana alt alanın birleşimidir, teleoperasyon ve telepresence.
Teleoperasyon
Teleoperation, bir makinenin uzaktan çalıştırıldığını gösterir. Anlam olarak "uzaktan kumanda" ifadesine benzer, ancak genellikle araştırma, akademik ve teknik ortamlarda karşımıza çıkmaktadır. En yaygın olarak robotik ve mobil robotlarla ilişkilendirilir, ancak bir cihaz veya makinenin uzaktan bir kişi tarafından çalıştırıldığı çok çeşitli koşullara uygulanabilir.[1]

Uzaktan operasyona atıfta bulunmak için hem araştırma hem de teknik topluluklarda kullanılan en standart terim teleoperasyondur. Bu, "telepresence ", operatörün uzak bir ortamda bulunduğunu hissettiği şekilde sürükleyici bir arayüzle yapılandırılmış telerobotik sistemlerin alt kümesini ifade eder ve varlığını uzak robot aracılığıyla yansıtır. Operatörlerin bir cihazda mevcut olduğunu hissetmesini sağlayan ilk telepresence sistemlerinden biri tüm birincil duyular (görme, ses ve dokunma) aracılığıyla uzak çevre, Sanal Fikstür ABD'de geliştirilen sistem Hava Kuvvetleri Araştırma Laboratuvarları 1990'ların başında. Sistem, operatörlerin hünerli görevleri (deliklere mandalları yerleştirerek) uzaktan gerçekleştirmesine olanak tanıdı; böylece operatör, aslında görevi uzaktan gerçekleştiren bir robot iken, mandalları yerleştiriyormuş gibi hissedecekti.[2][3][4]
Bir telemanipülatör (veya teleoperatör) bir insan operatör tarafından uzaktan kontrol edilen bir cihazdır. Basit durumlarda, kontrol eden operatörün komut eylemleri, örneğin radyo kontrollü bir uçak modelinde veya bağlı bir derin batma aracında olduğu gibi, kontrol edilen cihazdaki eylemlere doğrudan karşılık gelir. İletişim gecikmelerinin doğrudan kontrolü kullanışsız hale getirdiği (uzak bir gezegensel gezici gibi) veya operatörün iş yükünün azaltılması istendiği durumlarda (uzaktan kumandalı bir casus veya saldırı uçağında olduğu gibi), cihaz doğrudan kontrol edilmeyecek, bunun yerine belirtilen yol. Artan karmaşıklık seviyelerinde, cihaz, engellerden kaçınma gibi konularda bir şekilde bağımsız olarak çalışabilir ve bu, aynı zamanda yaygın olarak gezegensel gezicilerde kullanılır.
Operatörün uzaktan bir robotu kontrol etmesine izin verecek şekilde tasarlanmış cihazlara bazen telekerik robotik denir.
Telerobotics ve telepresence'ın iki ana bileşeni görsel ve kontrol uygulamalarıdır. Uzak kamera, robottan gelen görüntünün görsel bir temsilini sağlar. Robotik kamerayı sezgisel kontrole izin veren bir perspektife yerleştirmek, Bilim Kurgu'ya (Bilim Kurgu) dayanmasına rağmen yeni bir tekniktir.Robert A. Heinlein 's Ali 1942), hız, çözünürlük ve bant genişliği, robot kamerayı anlamlı bir şekilde kontrol edebilme görevi için ancak son zamanlarda yeterli olduğu için verimli olmamıştır. Bir başa takılan ekran, kameranın kontrolü aşağıdaki şekilde gösterildiği gibi kafayı takip ederek kolaylaştırılabilir.
Bu, yalnızca kullanıcı sistemin gecikmesi, hareketlere yanıttaki gecikme, görsel sunum konusunda rahat hissederse çalışır. Yetersiz çözünürlük, video görüntüsünün gecikmesi, hareket ve yanıtın mekanik ve bilgisayarda işlenmesinde gecikme ve kamera lensi ve başa takılan ekran lenslerinden kaynaklanan optik bozulma gibi sorunlar, kullanıcınınsimülatör hastalığı Bu, hareketin görsel temsili ile vestibüler uyarımın olmaması ile daha da kötüleşir.
Kayıt hataları, aşırı filtreleme nedeniyle hareket yanıtında gecikme, küçük hareketler için yetersiz çözünürlük ve yavaş hız gibi kullanıcı hareketleri arasındaki uyumsuzluklar bu sorunlara katkıda bulunabilir.
Aynı teknoloji robotu da kontrol edebilir, ancak daha sonra el-göz koordinasyonu sorunlar sistem aracılığıyla daha da yaygın hale gelir ve kullanıcının gerginliği veya hayal kırıklığı sistemin kullanımını zorlaştırabilir.[kaynak belirtilmeli ]
Robot üretme eğilimi, özgürlük derecesi çünkü bu, kontrol sorunlarını azaltır. Bilgisayarlardaki son gelişmeler, vurguyu daha fazla özgürlük derecesine kaydırdı ve hareketlerinde daha akıllı ve daha insan gibi görünen robotik cihazlara izin verdi. Bu aynı zamanda kullanıcının yapabileceği şekilde daha doğrudan teleoperasyona izin verir. robotu kendi hareketleriyle kontrol edin.[5]
Arayüzler
Telerobotik bir arayüz, ortak bir MMK (monitör-fare-klavye) arayüzü kadar basit olabilir. Bu sürükleyici olmasa da ucuzdur. İnternet bağlantıları tarafından yönlendirilen Telerobotics genellikle bu türdendir. MMK'ya yapılan değerli bir değişiklik, düzlemsel robot hareketi için daha sezgisel bir navigasyon şeması sağlayan bir joystick'tir.
Özel telepresence kurulumları, tek veya çift gözlü ekrana sahip başa takılan bir ekranı ve kumanda kolu ve ilgili düğme, kaydırıcı, tetik kontrolleri ile ergonomik olarak eşleştirilmiş bir arayüz kullanır.
Diğer arayüzler tam anlamıyla birleşiyor sanal gerçeklik bilgisayar tarafından oluşturulan görüntüler yerine arayüzler ve gerçek zamanlı video.[6] Başka bir örnek, bir çok yönlü koşu bandı sürükleyici bir görüntüleme sistemi ile robotun yürüyen veya koşan kişi tarafından sürülmesi. Ek değişiklikler, Kızılötesi termal görüntüleme, gerçek zamanlı gibi birleştirilmiş veri ekranlarını içerebilir. tehdit değerlendirmesi veya cihaz şemaları.[kaynak belirtilmeli ]
Başvurular
Uzay
Hariç Apollo programı, çoğu uzay araştırması telerobotic ile yapılmıştır uzay Araştırmaları. Çoğu uzay tabanlı astronomi örneğin, telerobotic ile gerçekleştirilmiştir teleskoplar. Rus Lunokhod-1 görevi örneğin, yerdeki insan operatörleri tarafından gerçek zamanlı olarak (2,5 saniyelik ışık hızında zaman gecikmesiyle) sürülen uzaktan kumandalı bir gezgini aya yerleştirin. Robotik gezegen keşif programları, insanlar tarafından yer istasyonlarında programlanan uzay aracını kullanır ve esasen uzun zaman gecikmeli bir telerobotik operasyon şekli elde eder. Son zamanlarda kayda değer örnekler şunları içerir: Mars keşif gezgini (MER) ve Merak gezgini. MER görevi durumunda, uzay aracı ve gezici, her günün operasyonunu yerdeki gezici sürücüleri programlayarak, depolanmış programlarda çalıştırdı. Uluslararası Uzay istasyonu (ISS) adı verilen iki kollu bir telemanipülatör kullanır Dextre. Daha yakın zamanlarda insansı bir robot Robonaut[8] telerobotik deneyler için uzay istasyonuna eklendi.
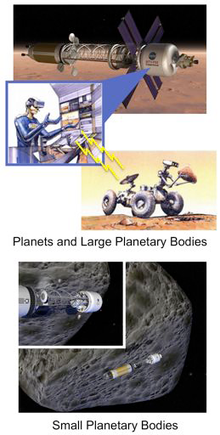
NASA, son derece yetenekli telerobotik sistemlerin kullanılmasını önerdi[9] yörüngeden insan keşfini kullanarak gelecekteki gezegen keşfi için. İçin bir konseptte Mars Keşfi öneren Landis öncü misyonu Mars insan aracının Mars'a bir mürettebat getirdiği, ancak yüzeye inmek yerine yörüngede kaldığı, yüksek yetenekli bir uzaktan robotun yüzeyde gerçek zamanlı olarak çalıştırıldığı yapılabilir.[10] Böyle bir sistem, basit uzun zaman gecikmeli robotik teknolojisinin ötesine geçecek ve gezegende sanal telepresence rejimine geçecektir. Bu kavramın bir çalışması, Gerçek Zamanlı Robotik İşlemleri Kullanan İnsan Keşfi (HERRO), böyle bir görevin çok çeşitli gezegensel varış noktalarını keşfetmek için kullanılabileceğini öne sürdü.[7]
Telepresence ve video konferans

Mobil cihazlar, tabletler ve taşınabilir bilgisayarlar kullanılarak yapılan yüksek kaliteli video konferansın yaygınlığı, telepresence robotlarında önemli bir büyüme sağlayarak ofiste, evde, okulda vb. İletişim ve işbirliği için uzak fiziksel varlığın daha iyi algılanmasına yardımcı oldu. şahsen orada olmak. Robot avatarı uzaktaki kişinin komutuyla hareket edebilir veya etrafa bakabilir.[11][12]
Her ikisinin de bir ekranda video konferans kullanan iki temel yaklaşım vardır: 1) masaüstü telepresence robotları - tipik olarak, uzaktaki kişinin ekranı kaydırarak ve eğerek uzak bir ortama bakmasını sağlamak için motorlu bir masaüstü standına bir telefon veya tablet monte edin veya 2) sürülebilir telepresence robotları - tipik olarak bir dolaşım üssüne monte edilmiş bir ekran (entegre veya ayrı telefon veya tablet) içerir. Masaüstü telepresence robotlarının bazı örnekleri arasında Kubi by Revolve Robotics, Galileo by Motrr ve Swivl bulunur. Dolaşım telepresence robotlarının bazı örnekleri arasında Beam by Uygun Teknolojiler, Double by Double Robotics, RP-Vita iRobot ve InTouch Health, Anybots, Vgo, TeleMe by Mantarobot ve Romo by Romotive. Daha modern roaming telepresence robotları, otonom olarak çalışma yeteneği içerebilir. Robotlar alanı haritalayabilir ve odalar ile yerleştirme istasyonları arasında giderken engellerden kaçınabilir.[13]
Geleneksel video konferans sistemleri ve telepresence odaları genellikle uzak uç kontrollü Pan / Tilt / Zoom kameraları sunar. Bir toplantı sırasında uzaktaki kullanıcının aygıtın kafasını çevirmesi ve doğal bir şekilde etrafına bakabilmesi, genellikle bir telepresence robotunun en güçlü özelliği olarak görülür. Bu nedenle, geliştiriciler, çok daha düşük maliyetli bir robot yaratmak için bu en güçlü özelliğe odaklanan yeni masaüstü telepresence robotları kategorisinde ortaya çıktılar. Baş ve boyun Robotları olarak da adlandırılan masaüstü telepresence robotları[14] kullanıcıların bir toplantı sırasında etrafa bakmalarına izin verir ve bir yerden bir yere taşınabilecek kadar küçüktür, bu da uzaktan gezinme ihtiyacını ortadan kaldırır.[15]
Bazı telepresence robotları, düzenli olarak okula gidemeyen bazı uzun süreli hastalığı olan çocuklar için oldukça faydalıdır. En son yenilikçi teknolojiler insanları bir araya getirebilir ve birbirlerine bağlı kalmalarını sağlayarak yalnızlığın üstesinden gelmelerine önemli ölçüde yardımcı olur. [16]
Deniz uygulamaları
Deniz uzaktan kumandalı araçlar (ROV'ler), dalgıçlar için çok derin veya çok tehlikeli suda çalışmak için yaygın olarak kullanılır. Offshore tamir ediyorlar petrol platformları ve batık gemileri kaldırmak için kabloları bağlayın. Genellikle bir ip ile bir yüzey gemisindeki kontrol merkezine bağlanırlar. Enkazı Titanik bir ROV ve mürettebat tarafından işletilen bir gemi tarafından keşfedildi.
Teletıp
Ek olarak, tıbbi cihazlar ve minimal invaziv cerrahi sistemler alanında çok sayıda telerobotik araştırma yapılmaktadır. Birlikte robotik cerrahi sistemde, bir cerrah, ellerin içeri girmesine izin vermek için göğüs boşluğunu açmaya gerek kalmadan, manipülatör için yeterince büyük minik deliklerden vücudun içinde çalışabilir.
Acil Müdahale ve kolluk kuvvetleri robotları
NIST Acil Müdahale için kullanılan bir dizi test standardını korur[17] ve kolluk kuvvetleri telerobotik sistemler.[18][19]
Diğer uygulamalar
Uzaktan manipülatörler işlemek için kullanılır radyoaktif malzemeler.
Telerobotics, kurulum sanatı parçalar; Telegarden bir robotun Web üzerinden kullanıcılar tarafından çalıştırıldığı bir proje örneğidir.
Ayrıca bakınız
- Astrobotik Teknoloji
- Dragon Runner kentsel savaş için yapılmış bir askeri robot
- Lunokhod
- Tıbbi robot
- Askeri robot
- Uzaktan kumandalı araç
- Uzaktan manipülatör
- Robonaut
- Akıllı cihaz
- Ruh
- Kar temizleme robotu
- UWA Telerobot
Referanslar
- ^ Corley, Anne-Marie (Eylül 2009). "Robot Suretlerinin Gerçeği". spectrum.ieee.com. Alındı 19 Mart 2013.
- ^ Rosenberg, L.B. (1992). "Uzak Ortamlarda Operatör Performansını Artırmak İçin Algısal Kaplamalar Olarak Sanal Fikstürlerin Kullanımı". Teknik Rapor AL-TR-0089, USAF Armstrong Laboratuvarı, Wright-Patterson AFB OH, 1992.
- ^ Rosenberg, L.B. (1993). "Sanal Fikstür: Telerobotik Manipülasyon için Algısal Katmanlar". Proc. IEEE Yıllık Int. Sanal Gerçeklik Sempozyumu (1993): sayfa 76–82 ,.
- ^ Rosenberg, Louis B. "Telepresence Ortamlarında operatör performansını artıran araçlar olarak Sanal Fikstürler". Telemanipulator Teknolojisi ve Space Telerobotics. (1993) doi:10.1117/12.164901.
- ^ Miller, Nathan, vd. "Bağlantısız insansı teleoperasyon için atalet algılamasından hareket yakalama "Humanoid Robots, 2004 4. IEEE / RAS Uluslararası Konferansı. Cilt 2. IEEE, 2004.
- ^ Burdea, Grigore C. "Davetli inceleme: sanal gerçeklik ve robotik arasındaki sinerji. "Robotik ve Otomasyonda IEEE İşlemleri 15.3 (1999): 400-410.
- ^ a b Schmidt, G.R .; Landis, G.A .; Oleson, S.R. "Yörüngeden Telerobotik Keşif Kullanarak Mars ve Venüs'e HERRO Görevleri" (PDF). Arşivlenen orijinal (PDF) 13 Mayıs 2013 tarihinde. Alındı 15 Kasım 2012.; Ayrıca bakınız: Oleson, S.R .; Landis, G.A .; McGuire, M .; Schmidt, G.R. (2012). "Yörüngeden Telerobotik Yüzey Keşfini Kullanarak Mars'a HERRO Görevleri" (PDF). British Interplanetary Society Dergisi. Arşivlenen orijinal (PDF) 17 Şubat 2013., ve HERRO (15 Kasım 2012'de erişildi)
- ^ "Robonaut ana sayfası". Nasa. Alındı 27 Mayıs 2011.
- ^ Adam Mann, "Neredeyse Orada Olmak: Neden Uzay Araştırmalarının Geleceği Düşündüğünüz Gibi Değil ", Kablolu, 11.12.12 (15 Kasım 2012'de erişildi)
- ^ G.A. Landis, "Mars Orbit'ten Teleoperasyon: İnsan Keşifleri İçin Bir Teklif," Açta Astronautica, Cilt. 61, No. 1, s. 59-65; IAC-04-IAA.3.7.2.05, 55th International Astronautical Federation Congress, Vancouver BC, 4–8 Ekim 2004.
- ^ Rick Lehrbaum - InfoWeek "Telepresence Robotlarının Saldırısı "," InfoWeek ", 01.11.13 (8 Aralık 2013'te erişildi)
- ^ Jacob Ward, "Ben bir robot patronum "," Popüler Bilim ", 10.28.13
- ^ Honig, Zach. "iRobot'un çubuk üzerinde Ava 500 telepresence uygulaması şu anda kullanıma sunuluyor (güncelleme: 69.500 $ !!)". Engadget. Alındı 4 Temmuz 2014.
- ^ John Biggs, "Tech Crunch - Revolve Robotics, Boynunuz Gibi Çalışan Bir Telepresence Rig olan Kubi'yi Duyurdu "," Tech Crunch ", Aralık 2012
- ^ Sanford Dickert ve David Maldow, Esq. "Telepresence Options Dergisi - Endüstrinin Robotik Telepresence Durumu "," Telepresence Options ", Yaz 2013 (8 Aralık 2013'te erişildi)
- ^ Telepresence robotu, Uzun süreli hastalığı olan çocuklar. "Telepresence robotları, kronik hastalığı olan çocukların okulda sosyal, akademik bağlarını sürdürmelerine yardımcı oluyor". robohub. California Üniversitesi, Irvine, Eylül 2016. Alındı 6 Eylül 2019.
- ^ "Acil müdahale robotları".
- ^ "Müdahale robotları için standart test yöntemleri". NIST Mühendislik Laboratuvarı. Alındı 4 Haziran 2020.
- ^ "Tepki robotları için ASTM Alt Komitesi E54.09 standartları".
Dış bağlantılar
- Telerobotics and Telepistemology Bibliyografya Ken Goldberg tarafından derlendi Leonardo / ISAST
- "Patron Robotik ve Arkanda Yuvarlanıyor" John Markoff tarafından yazılan makale New York Times 4 Eylül 2010
- Neredeyse Orada Olmak: Neden Uzay Araştırmalarının Geleceği Düşündüğünüz Gibi Değil Adam Mann, Wired Magazine'de, 11 Aralık 2012
