Elektrodinamik süspansiyon - Electrodynamic suspension

Elektrodinamik süspansiyon (EDS) bir biçimdir manyetik kaldırma zamanla değişen manyetik alanlara maruz kalan iletkenlerin bulunduğu. Bu indükler girdap akımları itici bir yaratan iletkenlerde manyetik alan iki nesneyi ayrı tutan.
Bu zamanla değişen manyetik alanlar, iki nesne arasındaki göreceli hareketten kaynaklanabilir. Çoğu durumda, tek bir manyetik alan kalıcı bir alandır. kalıcı mıknatıs veya a süper iletken mıknatıs ve diğer manyetik alan, mıknatıs diğer nesnedeki bir iletkene göre hareket ederken meydana gelen alan değişikliklerinden kaynaklanır.
Elektrodinamik süspansiyon, bir AC elektrik kaynağı tarafından çalıştırılan bir elektromıknatıs değişen manyetik alanı ürettiğinde de meydana gelebilir, bazı durumlarda, lineer asenkron motor alanı oluşturur.
EDS için kullanılır Maglev trenleri Japonlar gibi SCMaglev. Ayrıca bazı manyetik olarak kaldırılan yatak sınıfları için de kullanılır.
Türler
Yıllar boyunca bunun birçok örneği kullanılmıştır.
Bedford levitatör
1939'dan Bedford, Peer ve Tonks tarafından yapılan bu erken konfigürasyonda, iki eş merkezli silindirik bobin üzerine bir alüminyum levha yerleştirilir ve bir AC akımla çalıştırılır. Parametreler doğru olduğunda, plaka 6 eksenli sabit kaldırma sergiler.[1]
Levitasyonunun erimesi
1950'lerde, küçük miktarlarda metalin birkaç on kHz'lik bir manyetik alan tarafından kaldırıldığı ve eritildiği bir teknik geliştirildi. Bobin, soğutucunun içinden sirküle edilmesini sağlayan metal bir boruydu. Genel form genellikle koni şeklindedir ve üstü düzdür. Bu, hareketsiz bir atmosferin kullanılmasına izin verdi ve ticari olarak başarılı oldu.[1]
Doğrusal endüksiyon motoru

Eric Laithwaite ve meslektaşları Bedford levitatörünü aldı ve aşamalar halinde geliştirdi ve iyileştirdi.
İlk önce, levitatörü bir eksen boyunca daha uzun yaptılar ve bir eksen boyunca nötr olarak kararlı ve diğer tüm eksenler boyunca sabit olan bir levitatör yapabildiler.
Daha fazla gelişme, tek fazlı enerji veren akımın bir lineer asenkron motor Havaya yükselme ve itmeyi birleştiren.
Daha sonra "çapraz akış" sistemleri onun İmparatorluk Koleji laboratuvar, gibi Manyetik nehir iki zıt uzun kutbu yan yana düzenleyerek akı yolunu yanlamasına kapatarak, çok uzun kutuplara sahipken uzun, kalın demir destek plakalarına ihtiyaç duyma sorunlarının çoğundan kaçınılmıştır. Ayrıca, birincil levitatörün yapımını ve taşınmasını kolaylaştıran uygun bölümlere ayırmayı başardılar.[2]
Boş akı
Sıfır akı sistemleri, bir manyetik alana maruz kalan, ancak 8 ve benzeri konfigürasyonlarda sarılmış bobinlere sahip olarak çalışır, öyle ki mıknatıs ve bobinler arasında nispi hareket olduğunda, ancak merkezde, potansiyel sıfırlandığı için akım akışı olmaz. Merkezin dışına kaydırıldıklarında, akım akar ve bobin tarafından boşluğu geri yükleme eğiliminde olan güçlü bir alan üretilir.
Bu şemalar 1960'larda Powell ve Danby tarafından önerildi ve ihtiyaç duyulan yüksek manyetik basıncı oluşturmak için süper iletken mıknatısların kullanılabileceğini önerdiler.
Inductrack
Inductrack bir pasif, güvenli manyetik kaldırma sistem, yolda yalnızca güçsüz tel döngüleri ve kalıcı mıknatıslar kullanarak ( Halbach dizileri ) araçta elde etmek için manyetik kaldırma. İz, iki konfigürasyondan biri, bir "merdiven yolu" ve bir "lamine yol" olabilir. Merdiven yolu elektriksiz yapılmıştır Litz teli kablolar ve lamine parça, istiflenmiş bakır veya alüminyum levhalardan yapılmıştır.
İki tasarım vardır: yüksek hızlı çalışma için optimize edilmiş Inductrack I ve daha düşük hızlarda daha verimli olan Inductrack II.
Elektrodinamik yatak

Elektrodinamik rulmanlar (EDB), pasif bir manyetik teknoloji olan yeni bir rulman türüdür. EDB'lerin çalışması için herhangi bir kontrol elektroniği gerektirmez. Hareketin oluşturduğu elektrik akımları ile çalışırlar ve geri yükleme kuvveti oluştururlar.
Kullanımlar
Maglev

EDS maglev trenlerinde, hem demiryolu hem de tren manyetik bir alan uygular ve tren, bu manyetik alanlar arasındaki itme kuvveti tarafından kaldırılır. Trendeki manyetik alan, süper iletken mıknatıslar tarafından üretilir ( SCMaglev ) veya bir dizi kalıcı mıknatısla ( Inductrack ). Pistteki itme kuvveti, bir indüklenmiş manyetik alan yoldaki teller veya diğer iletken şeritlerde. İtici maglev sistemlerinin en büyük avantajı, doğal olarak kararlı olmalarıdır - küçük daralma iz ve mıknatıslar arasındaki mesafe, mıknatısları orijinal konumlarına geri püskürtmek için güçlü kuvvetler yaratırken, mesafedeki hafif bir artış kuvveti büyük ölçüde azaltır ve aracı tekrar doğru mesafeye geri döndürür.[2] Geri bildirim kontrolü gerekli değildir.
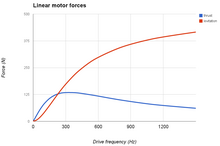
İtici sistemlerin de büyük bir dezavantajı vardır. Yavaş hızlarda, bu bobinlerde zamana göre manyetik akıdaki yavaş değişim tarafından indüklenen akım, trenin ağırlığını desteklemek için yeterli itici bir elektromanyetik kuvvet üretmek için yeterince büyük değildir. Ayrıca, düşük hızda EDS için enerji verimliliği düşüktür.[3] Bu nedenle trenin, havaya yükselmeyi sürdürebilecek bir hıza ulaşana kadar treni desteklemek için tekerlekleri veya başka bir iniş takımı formu olmalıdır. Bir tren, örneğin ekipman problemleri nedeniyle herhangi bir yerde durabileceğinden, tüm yol hem düşük hızlı hem de yüksek hızlı çalışmayı destekleyebilmelidir. Diğer bir dezavantajı, itici sistemin doğal olarak, kaldırma mıknatıslarının önünde ve arkasında, mıknatıslara karşı hareket eden ve bir sürüklenme biçimi oluşturan bir alan yaratmasıdır. Bu genellikle sadece düşük hızlarda bir sorundur; daha yüksek hızlarda, etkinin tam potansiyeline ulaşmak için zamanı yoktur ve diğer sürükleme biçimleri hakimdir.[2]
Çekme kuvveti, elektrodinamik sistemin avantajına kullanılabilir, ancak raylarda değişken bir kuvvet yarattığı için, çoğu lineer motorda olduğu gibi ayrı bir reaksiyon plakasına ihtiyaç duymadan treni sürmek için reaksiyoner bir sistem olarak kullanılabilir. sistemleri.
Alternatif olarak, trenin içindeki mıknatıslara bir kuvvet uygulamak ve trenin ileri doğru hareket etmesini sağlamak için kılavuz yolu üzerindeki tahrik bobinleri kullanılır. Trene kuvvet uygulayan tahrik bobinleri, etkili bir şekilde doğrusal motor: Bobinler boyunca akan alternatif bir akım, yol boyunca ileriye doğru hareket eden, sürekli değişen bir manyetik alan üretir. Alternatif akımın frekansı, trenin hızına uyacak şekilde senkronize edilir. Mıknatısların trene uyguladığı alan ile uygulanan alan arasındaki ofset, treni ileri doğru hareket ettiren bir kuvvet yaratır.
Prensipler
İletken bir döngü değişen bir manyetik alan yaşadığında, Lenz yasası ve Faraday yasası, değişen manyetik alan bir Elektrik hareket gücü (EMF) devre etrafında. Sinüzoidal bir uyarı için, bu EMF, değişikliklerin en hızlı olduğu yerde (en güçlü olduğu zamandan ziyade) zirveye ulaşarak alanın 90 derece ilerisinde aşamalıdır:

nerede N telin dönüş sayısıdır (basit bir döngü için bu 1'dir) ve ΦB weberlerin manyetik akısıdır. tek döngü.
Alan ve potansiyeller faz dışı olduğundan, hem çekici hem de itici kuvvetler üretilir ve net bir yükselme oluşmaması beklenebilir. Bununla birlikte, EMF uygulanan manyetik alana 90 derece olmasına rağmen, döngü kaçınılmaz olarak endüktansa sahiptir. Bu endüktif empedans, frekansa bağlı bir faz açısı ile tepe akımı geciktirme eğilimindedir (çünkü endüktif empedans herhangi bir döngünün frekansı ile artar).

burada K bobinin empedansı, L endüktans ve R dirençtir, gerçek faz kurşun, ωL / R ürününün ters tanjantı olarak türetilebilir, yani., tek döngülü bir RL devresindeki standart faz kurşun kanıtı.
Fakat:

akıntı nerede
Bu nedenle, düşük frekanslarda, fazlar büyük ölçüde ortogonaldir ve akımlar daha düşüktür ve önemli bir yükselme meydana gelmez. Ancak yeterince yüksek frekansta, endüktif empedans baskındır ve akım ve uygulanan alan hemen hemen aynı hizadadır ve bu akım uygulanana zıt bir manyetik alan oluşturur ve bu, havaya yükselmeye izin verir.
Bununla birlikte, endüktif empedans frekansla orantılı olarak arttığından, EMF de artar, bu nedenle akım, direnç endüktif empedansa göre küçük olduğunda bir sınırlama eğilimindedir. Bu aynı zamanda kaldırma kuvvetini de sınırlar. Bu nedenle, kaldırma için kullanılan güç, frekansla büyük ölçüde sabittir. Ancak bobinlerde kullanılan sonlu iletken boyutlarından dolayı girdap akımları da vardır ve bunlar frekansla büyümeye devam etmektedir.
Hava boşluğunda depolanan enerji HB / 2 (veya μ0H2/ 2) çarpı hava boşluğu hacmi, hava boşluğu boyunca yüke dik yönde uygulanan kuvvet (yani., yerçekimine doğrudan karşı koyan kuvvet) uzaysal türev (= gradyan ) bu enerjinin. Hava boşluğu hacmi, hava boşluğunun genişliğiyle çarpılan enine kesit alanına eşittir, bu nedenle genişlik birbirini götürür ve μ'luk bir süspansiyon kuvvetiyle kalırız.0H2/ 2 kat hava aralığı enine kesit alanı, bu da maksimum dayanılabilir yükün mıknatısın manyetik alan yoğunluğunun karesi olarak değiştiği anlamına gelir, kalıcı veya başka türlü ve doğrudan enine kesit alanı olarak değişir.
istikrar
Statik
Basit kalıcı mıknatıs konfigürasyonlarının aksine, elektrodinamik kaldırma sabit hale getirilebilir. Metalik iletkenlerle elektrodinamik kaldırma, bir form sergiler. diyamanyetizma ve yaklaşık 0,7'lik bağıl geçirgenlik elde edilebilir (frekans ve iletken konfigürasyonuna bağlı olarak). Uygulanabilir histerezis döngüsünün ayrıntıları göz önüne alındığında, frekansa bağlı davranış değişkenliği, yerleştirilmesi muhtemel olan manyetik malzemeler için asgari öneme sahip olmalıdır.
Dinamik
Bu tür bir maglev, kaldırılan nesnenin sürüklenmeden kaynaklanan bir salınıma maruz kalmasına neden olabilir ve bu salınım her zaman yeterince yüksek bir hızda gerçekleşir. Bu salınımlar oldukça ciddi olabilir ve süspansiyonun başarısız olmasına neden olabilir.
Bununla birlikte, doğal sistem seviyesinde sönümleme, özellikle büyük ölçekli sistemlerde bunun meydana gelmesini sıklıkla önleyebilir.[5]
Alternatif olarak, hafif eklenmesi ayarlanmış kütle damperleri salınımların sorunlu olmasını önleyebilir.[6]
Elektronik stabilizasyon da kullanılabilir.[7]
Ayrıca bakınız
Referanslar
- ^ a b Laithwaite, Eric R. (Şubat 1975). "Doğrusal elektrikli makineler — Kişisel bir görünüm". IEEE'nin tutanakları. 63 (2): 250–290. Bibcode:1975IEEEP..63..250L. doi:10.1109 / PROC.1975.9734. S2CID 20400221.
- ^ a b c "Maglev: Trenleri Yerden Nasıl Alıyorlar?", Popüler Bilim, Aralık 1973 s. 135.
- ^ Flankl, Michael; Wellerdieck, Tobias; Tüysüz, Arda & Kolar, Johann W. (Kasım 2017). "Yüksek hızlı taşımada elektrodinamik süspansiyon için ölçeklendirme yasaları". IET Elektrik Güç Uygulamaları. 12 (3): 357–364. doi:10.1049 / iet-epa.2017.0480. S2CID 117369870. https://www.pes-publications.ee.ethz.ch/uploads/tx_ethpublications/22_Scaling_laws_for_electrodynamic_suspension_Flankl_accepted-version.pdf
- ^ Nave, Carl R. "Faraday Yasası". HiperFizik. Georgia Eyalet Üniversitesi. Alındı 29 Ağustos 2011.
- ^ İtme Kuvveti Maglev Süspansiyon Sisteminin Dinamik Stabilitesinin İncelenmesi Y. Cai ve D.M. Rote Enerji Teknolojisi Bölümü Argonne Ulusal Laboratuvarı
- ^ Ayrı bir kılavuz yapıya sahip elektrodinamik bir süspansiyon sistemindeki dikey salınımların kararlılığı V.A. Dzenzerskii, A. A. Zevin ve L.A. Filonenko
- ^ http://www.deboeij.com/docs/TransMag_deboeij_control_3dof_maglev.pdf