Doğrusal filtre - Linear filter
Bu makale genel bir liste içerir Referanslar, ancak büyük ölçüde doğrulanmamış kalır çünkü yeterli karşılık gelmiyor satır içi alıntılar. (Mart 2011) (Bu şablon mesajını nasıl ve ne zaman kaldıracağınızı öğrenin) |
Doğrusal filtreler çıkış sinyallerini üretmek için zamanla değişen giriş sinyallerini işlemek, doğrusallık. Çoğu durumda bu doğrusal filtreler ayrıca zamanla değişmeyen (veya vardiya değişmez ) bu durumda tam olarak kullanılarak analiz edilebilirler LTI ("doğrusal zamanla değişmeyen") sistem teorisi açığa vurmak transfer fonksiyonları frekans alanında ve bunların dürtü yanıtları zaman alanında. Böyle doğrusal gerçek zamanlı uygulamaları sinyal işleme filtreleri zaman alanında kaçınılmaz olarak nedensel, transfer fonksiyonları üzerinde ek bir kısıtlama. Sadece doğrusal bileşenlerden (dirençler, kapasitörler, indüktörler ve doğrusal yükselticiler) oluşan bir analog elektronik devre, benzer mekanik sistemler veya benzer şekilde bu kategoriye mutlaka girecektir. dijital sinyal işleme sadece doğrusal elemanlar içeren sistemler. Doğrusal zamanla değişmeyen filtreler, aşağıdakilere tepkileri ile tamamen karakterize edilebildiğinden sinüzoidler farklı frekansların (onların frekans tepkisi ), bazen frekans filtreleri olarak bilinirler.
Doğrusal zamanla değişmeyen filtrelerin gerçek zamanlı olmayan uygulamalarının nedensel olması gerekmez. Birden fazla boyutun filtreleri de şu şekilde kullanılır: Görüntü işleme. Doğrusal filtreleme genel kavramı aynı zamanda diğer alanlara ve teknolojilere de uzanır. İstatistik, veri analizi, ve makine Mühendisliği.
Dürtü tepkisi ve transfer işlevi
Bir doğrusal zamanla değişmeyen (LTI) filtresi, kendi dürtü yanıtı hve herhangi bir filtrenin çıktısı matematiksel olarak şu şekilde ifade edilir: kıvrım Bu dürtü yanıtı ile girdinin frekans tepkisi, filtrenin verdiği transfer işlevi , filtrenin alternatif bir karakterizasyonudur. Tipik filtre tasarım hedefleri, belirli bir frekans yanıtını, yani transfer fonksiyonunun büyüklüğünü gerçekleştirmektir. ; önemi evre Frekans alanında istenen bir (genlik) yanıtı elde etme sürecinde bir dalga biçiminin şekli daha büyük veya daha az bozulabildiği için, transfer fonksiyonunun oranı uygulamaya göre değişir. Frekans tepkisi, örneğin, istenmeyen frekans bileşenlerini bir girişten elemek için uyarlanabilir. sinyal veya bir amplifikatörü belirli bir frekans bandı içindeki sinyallerle sınırlandırmak için.


dürtü yanıtı h Doğrusal zamanla değişmeyen nedensel filtre, 0 zamanında tek bir darbeden oluşan bir girdi alacak olsaydı, filtrenin üreteceği çıktıyı belirtir. Sürekli zaman filtresindeki "dürtü", Dirac delta işlevi; içinde ayrık zaman filtrelemek Kronecker delta işlevi geçerlidir. Herhangi bir olası giriş sinyali ağırlıklı delta fonksiyonlarının (muhtemelen sonsuz) bir kombinasyonu olarak ifade edilebildiği ölçüde, dürtü yanıtı bu tür herhangi bir filtrenin yanıtını tamamen karakterize eder. Zaman içinde kayan dürtü yanıtını, bu delta işlevlerinin her birinin gelişine göre, her bir delta işlevinin genliği ile çarparak ve bu yanıtları birlikte toplayarak ( Üstüste binme ilkesi, tüm doğrusal sistemlere uygulanabilir) çıktı dalga biçimini verir.
Matematiksel olarak bu şu şekilde tanımlanır: kıvrım zamanla değişen bir giriş sinyalinin x (t) filtreler ile dürtü yanıtı h, şu şekilde tanımlanır:


İlk biçim, örneğin mekanik ve analog elektronik sistemleri tanımlayan sürekli zaman biçimidir. İkinci denklem, örneğin yazılımda uygulanan dijital filtreler tarafından kullanılan ayrık zamanlı bir versiyondur. dijital sinyal işleme. Dürtü tepkisi h herhangi bir doğrusal zamanla değişmeyen (veya ayrık zaman durumunda vardiya-değişmez) filtreyi tamamen karakterize eder. Girdi x olduğu söyleniyor "kıvrılmış "dürtü tepkisiyle h (muhtemelen sonsuz) bir süreye sahip olmak T (veya N örnekleme dönemleri ).
Filtre tasarımı, teknolojinin belirlediği belirli pratik kısıtlamalar veya sistemin istenen karmaşıklığı dahilinde uygulanabilecek olası bir transfer fonksiyonunun bulunmasından ve ardından seçilen teknolojiyi kullanarak bu transfer fonksiyonunu gerçekleştiren pratik bir tasarımdan oluşur. Bir filtrenin karmaşıklığı, aşağıdakilere göre belirlenebilir: sipariş filtrenin.
Burada ele aldığımız zaman alanı filtreleri arasında, istenen bir frekans yanıtına yaklaşabilen iki genel filtre transfer fonksiyonu sınıfı vardır. Çok farklı matematiksel işlemler, filtrelerin tasarımına uygulanır. sonsuz dürtü yanıtı (IIR) filtreleri, mekanik ve analog elektronik sistemlerin özellikleri ve sonlu dürtü yanıtı (FIR) filtreleri, ayrık zaman bilgisayarlar gibi sistemler (daha sonra dijital sinyal işleme ).
Sonsuz dürtü yanıt filtreleri
Yaylar ve kütleler sistemi gibi doğrusal bir filtre görevi gören fiziksel bir sistemi veya aşağıdakileri içeren bir analog elektronik devre düşünün: kapasitörler ve / veya indüktörler (gibi diğer doğrusal bileşenlerle birlikte dirençler ve amplifikatörler ). Böyle bir sistem bir dürtüye (veya sonlu süreli herhangi bir sinyale) maruz kaldığında, girişin süresini aşan bir çıkış dalga formu ile yanıt verir, sonunda bir veya başka şekilde üssel olarak azalır, ancak hiçbir zaman tamamen sıfıra yerleşmez (matematiksel olarak ). Böyle bir sistemin bir sonsuz dürtü yanıtı (IIR). Yukarıdaki evrişim integrali (veya toplama) tüm zamana yayılır: T (veya N) sonsuza ayarlanmalıdır.
Örneğin, bir sarkaç gibi sönümlü bir harmonik osilatörü veya bir rezonant L-C düşünün. tank devresi. Sarkaç hareketsizse ve onu harekete geçirerek bir çekiçle ("dürtü") vurursak, ileri geri sallanır ("rezonans"), örneğin 10 cm'lik bir genlikle. Diyelim ki 10 dakika sonra, sarkaç hala sallanıyordu, ancak genlik, orijinal büyüklüğünün yarısı olan 5 cm'ye düşmüş olacaktı. 10 dakika daha geçtikten sonra genliği sadece 2.5 cm, sonra 1.25 cm vb. Olur. Ancak hiçbir zaman tam olarak durmaz ve bu nedenle bu tepkiye (bir çekiçle vurarak) süre olarak "sonsuz" olarak adlandırırız.
Böyle bir sistemin karmaşıklığı sırasına göre belirlenir N. N, bir analog devredeki reaktif bileşenlerin sayısını belirlediğinden, genellikle bir transfer fonksiyonunun tasarımı üzerindeki bir kısıtlamadır; dijital IIR filtresinde, gerekli hesaplama sayısı N ile orantılıdır.
Sonlu dürtü yanıt filtreleri
Bir bilgisayar programında (veya sözde bir dijital sinyal işlemcisi ) ayrık zamanlı bir sistemdir; farklı (ancak paralel) bir matematiksel kavram kümesi, bu tür sistemlerin davranışını tanımlar. Bir dijital filtre uygulayan algoritma içeriyorsa bir IIR filtresi olabilir geri bildirim N zaman adımından sonra darbesi gerçekten sıfıra giden bir filtreyi kolayca uygulamak da mümkündür; buna denir sonlu dürtü yanıtı (FIR) filtresi.
Örneğin, bir zaman serisinde bir dürtü ile sunulduğunda:
- 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0 ...
0 zamanından 4. zamana kadar bu dürtüye yanıt veren ve başka yanıt vermeyen bir dizi çıktılar, örneğin:
- 0, 0, 0, 1, 1, 1, 1, 1, 0, 0, 0, 0, 0, 0, 0.....
İmpuls tepkisi, girişten sonra 4 adımlık bir süre sürmesine rağmen, 5. zamandan başlayarak gerçekten sıfıra gitti. Dürtü tepkisinin kapsamı sonluve bu, dördüncü dereceden bir FIR filtresi olarak sınıflandırılacaktır. Yukarıdaki evrişim integrali (veya toplama), yalnızca dürtü yanıtı T'nin tam süresine veya ayrık bir zaman filtresindeki N sırasına kadar uzanmalıdır.
Uygulama sorunları
Klasik analog filtreler IIR filtrelerdir ve klasik filtre teorisi düşük mertebeden verilen transfer fonksiyonlarının belirlenmesine odaklanır. rasyonel işlevler, aynı az sayıda reaktif bileşen kullanılarak sentezlenebilir.[1] Öte yandan dijital bilgisayarları kullanarak hem FIR hem de IIR filtrelerinin yazılımda uygulanması kolaydır.
Bir dijital IIR filtresi, genellikle bir FIR filtresinden daha az hesaplama gücü kullanarak istenen bir filtre yanıtına yaklaşabilir, ancak dijital işlemcilerin artan gücü göz önüne alındığında bu avantaj daha çok gereksizdir. FIR filtrelerini tasarlamanın ve karakterize etmenin kolaylığı, yeterli bilgi işlem gücü mevcut olduğunda onları filtre tasarımcısı (programcı) için tercih edilir kılar. FIR filtrelerinin diğer bir avantajı, dürtü yanıtlarının simetrik yapılabilmesidir, bu da frekans alanında bir yanıt anlamına gelir. tüm frekanslarda sıfır faz (sonlu bir gecikme dikkate alınmadan), bu, herhangi bir IIR filtresiyle kesinlikle imkansızdır.[2]
Frekans tepkisi
Frekans tepkisi veya transfer işlevi dürtü yanıtı biliniyorsa veya doğrudan analiz yoluyla elde edilebilir. Laplace dönüşümleri veya ayrık zamanlı sistemlerde Z-dönüşümü. Frekans tepkisi aynı zamanda fazı frekansın bir fonksiyonu olarak içerir, ancak çoğu durumda faz tepkisi çok az ilgi çeker veya hiç ilgilenmez. FIR filtreleri sıfır faza sahip olacak şekilde yapılabilir, ancak IIR filtreleri ile bu genellikle imkansızdır. Çoğu IIR transfer fonksiyonunda, aynı büyüklükte fakat farklı bir fazda bir frekans cevabına sahip ilgili transfer fonksiyonları vardır; çoğu durumda sözde minimum aşama transfer fonksiyonu tercih edilir.
Zaman alanındaki filtrelerin genellikle belirli bir frekans yanıtını izlemesi istenir. Daha sonra matematiksel bir prosedür, gerçekleştirilebilen (bazı kısıtlamalar dahilinde) bir filtre transfer fonksiyonu bulur ve istenen yanıtı bazı kriterler dahilinde yaklaşık olarak belirler. Ortak filtre yanıt özellikleri aşağıda açıklanmıştır:
- Bir alçak geçiş filtresi yüksek frekansları bloke ederken düşük frekansları geçer.
- Bir Yüksek geçiren filtre yüksek frekansları geçer.
- Bir bant geçiren filtre bir frekans bandını (aralığı) geçer.
- Bir bant durdurma filtresi yüksek ve düşük frekansları belirli bir bandın dışında geçirir.
- Bir çentik filtresi belirli bir frekansta boş yanıtı vardır. Bu işlev, yukarıdaki yanıtlardan biriyle birleştirilebilir.
- Bir tüm geçiş filtresi tüm frekansları eşit derecede iyi geçer, ancak aralarındaki faz ilişkisini değiştirir.
- Bir eşitleme filtresi, herhangi bir frekansı tamamen geçirmek veya engellemek için tasarlanmamıştır, bunun yerine frekansın bir işlevi olarak genlik yanıtını kademeli olarak değiştirmek için tasarlanmıştır: ön vurgu filtreler, eşitleyiciler veya ton kontrolleri iyi örneklerdir.
FIR transfer fonksiyonları
Bir FIR filtresi ile bir frekans yanıtı gereksinimini karşılamak, nispeten basit prosedürler kullanır. En temel formda, istenen frekans yanıtının kendisi şu çözünürlükle örneklenebilir: ve Fourier zaman alanına dönüştü. Bu filtre katsayılarını elde eder hbenkullanılan örneklenmiş frekanslarda frekans tepkisiyle eşleşen sıfır fazlı bir FIR filtresi uygulayan. İstenen yanıtı daha iyi eşleştirmek için, azaltılmalıdır. Bununla birlikte, filtrenin dürtü yanıtının süresi ve her bir çıkış değeri için (yukarıdaki ayrık zaman evrişimine göre) toplanması gereken terimlerin sayısı, nerede T ... Örnekleme periyodu ayrık zaman sisteminin (N-1 ayrıca sipariş FIR filtresinin). Böylece, bir dijital filtrenin karmaşıklığı ve ilgili hesaplama süresi, , istenen davranışa daha iyi yaklaşan filtre işlevlerine daha yüksek bir maliyet uygulamak. Aynı nedenle, kritik yanıtı daha düşük frekanslarda olan filtre fonksiyonları ( Örnekleme frekansı 1 / T) daha yüksek dereceli, hesaplama açısından daha yoğun bir FIR filtresi gerektirir. Bir IIR filtresi bu tür durumlarda çok daha verimli olabilir.


Okuyucu, başka bir yerde, tasarım yöntemleri hakkında daha fazla tartışma bulabilir. pratik FIR filtre tasarımı.
IIR transfer fonksiyonları
Klasik analog filtreler IIR filtreler olduklarından, sürekli zaman sistemlerinde yukarıda istenen çeşitli filtre yanıtlarını uygulayan olası transfer fonksiyonları yelpazesini incelemenin uzun bir geçmişi vardır. Kullanma dönüşümler bu sürekli zaman frekansı yanıtlarını, dijital IIR filtrelerinde kullanılmak üzere ayrık zamanda uygulananlara dönüştürmek mümkündür. Bu tür filtrelerin karmaşıklığı, sipariş N, sırasını tanımlayan rasyonel fonksiyon frekans cevabını açıklayan. Analog filtrelerde N sırası özellikle önemlidir, çünkü bir Ninci elektronik filtre siparişi uygulamak için N reaktif eleman (kapasitörler ve / veya indüktörler) gerektirir. Örneğin bir filtre kullanılarak uygulanırsa, biquad aşamaları kullanma op-amp'ler N / 2 aşamaları gereklidir. Dijital bir uygulamada, numune başına gerçekleştirilen hesaplama sayısı N ile orantılıdır. Dolayısıyla matematik problemi, şimdi göstereceğimiz gibi, daha küçük bir N kullanarak istenen yanıta en iyi yaklaşımı (bir anlamda) elde etmektir.
Aşağıda, bazı kriterlere göre optimize edilmiş, istenen bir yanıta yaklaşan birkaç standart filtre işlevinin frekans yanıtları verilmiştir. Bunların hepsi beşinci dereceden düşük geçişli filtrelerdir ve normalleştirilmiş birimlerde 0,5'lik bir kesme frekansı için tasarlanmıştır. Sıklık yanıtları, Butterworth, Chebyshev, ters Chebyshev, ve eliptik filtreler.
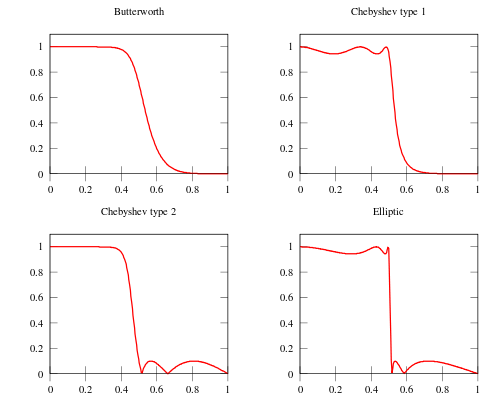
Görüntüden de anlaşılacağı gibi, eliptik filtre diğerlerinden daha keskindir, ancak pahasına dalgacıklar hem geçiş bandında hem de durdurma bandında. Butterworth filtresi en zayıf geçişe sahiptir, ancak geçiş bandı veya durdurma bandındaki dalgalanmalardan kaçınarak daha eşit bir tepkiye sahiptir. Bir Bessel filtresi (gösterilmemiştir), frekans alanında daha da zayıf bir geçişe sahiptir, ancak bir dalga formunun en iyi faz uygunluğunu korur. Farklı uygulamalar, farklı tasarım gereksinimlerini vurgular, bu (ve diğer) optimizasyonlar arasında farklı seçeneklere yol açar veya daha yüksek düzeyde bir filtre gerektirir.

Örnek uygulamalar
İkinci dereceden aktif bir R-C filtresi uygulayan popüler bir devre, Sallen-Key şematik diyagramı burada gösterilen tasarım. Bu topoloji, alçak geçiren, bant geçiren ve yüksek geçiren filtreler üretmek için uyarlanabilir.

Bir Ninci sıra FIR filtresi, bir bilgisayar programı veya giriş sinyalinin N gecikme aşamasına tabi olduğu özel donanım kullanılarak ayrı bir zaman sisteminde uygulanabilir. Filtrenin çıktısı, eşlik eden sinyal akış diyagramında gösterildiği gibi, bu gecikmiş sinyallerin ağırlıklı toplamı olarak oluşturulur. Filtrenin tepkisi, belirtilen ağırlık katsayılarına bağlıdır b0, b1, .... bN. Örneğin, tüm katsayılar birliğe eşit olsaydı, sözde vagon işlevi, daha sonra düşük frekans kazancı N + 1 ve frekans yanıtı ile düşük geçişli bir filtre uygular. sinc işlevi. Daha sofistike bir tasarım prosedüründen türetilen katsayılar kullanılarak frekans tepkisi için üstün şekiller elde edilebilir.
Filtre tasarımının matematiği
| Doğrusal analog elektronik filtreler |
|---|
|
Basit filtreler |
LTI sistem teorisi doğrusal tanımlar zamanla değişmeyen (LTI) her türden filtreler. LTI filtreleri tamamen şu şekilde tanımlanabilir: frekans tepkisi ve faz cevabı, özellikleri benzersiz bir şekilde tanımlayan dürtü yanıtı, ve tersine. Matematiksel bir bakış açısından, sürekli-zamanlı IIR LTI filtreleri doğrusal olarak tanımlanabilir. diferansiyel denklemler ve dürtü yanıtları olarak kabul edilir Green fonksiyonları denklemin. Sürekli-zamanlı LTI filtreleri, aynı zamanda, Laplace dönüşümü filtrenin tüm özelliklerinin modelini dikkate alarak analiz edilmesini sağlayan dürtü yanıtlarının sıfırlar ve kutuplar Laplace dönüşümlerinin karmaşık düzlem. Benzer şekilde, ayrık zamanlı LTI filtreleri, Z-dönüşümü dürtü tepkilerinin.
Bilgisayar filtre sentez araçlarının ortaya çıkmasından önce, Bode grafikleri ve Nyquist arazileri tasarım araçları olarak yoğun şekilde kullanılmıştır. Bugün bile, filtre davranışını anlamak için paha biçilmez araçlardır. Referans kitapları[3] çeşitli sıralarda, çeşitli filtre türleri için geniş frekans yanıtı, faz yanıtı, grup gecikmesi ve dürtü yanıtı grafiklerine sahipti. Ayrıca, RLC merdivenleri gibi filtrelerin nasıl uygulanacağını gösteren değer tabloları da içeriyordu - öğeleri yükseltmek pasif bileşenlere kıyasla pahalı olduğunda çok kullanışlıdır. Böyle bir merdiven, bileşen varyasyonuna minimum duyarlılığa sahip olacak şekilde de tasarlanabilir.[4] bilgisayar araçları olmadan değerlendirilmesi zor bir özellik.
Her biri sistem yanıtının bazı özelliklerini optimize etmeye çalışan birçok farklı analog filtre tasarımı geliştirilmiştir. Pratik filtreler için, farklı tasarım kriterleri arasında en iyi ödünleşimi sunabilen, bileşen sayısı ve maliyetin yanı sıra filtre yanıt özelliklerini de içerebilen özel bir tasarım bazen arzu edilir.
Bu açıklamalar, matematiksel filtrenin özellikleri (yani, frekans ve faz yanıtı). Bunlar olabilir uygulandı analog devreler olarak (örneğin, bir Sallen Anahtar filtresi topoloji, bir tür aktif filtre ) veya içindeki algoritmalar olarak dijital sinyal işleme sistemleri.
Dijital filtrelerin sentezlenmesi ve kullanılması, tasarımın kısıtlamalarının kullanımına izin verdiği analog filtrelerden çok daha esnektir. Bilhassa, bileşen toleranslarını dikkate almaya gerek yoktur ve çok yüksek Q seviyeleri elde edilebilir.
FIR dijital filtreler doğrudan kıvrım giriş sinyali ile istenen dürtü tepkisinin ölçülmesini sağlamak için kolayca tasarlanabilirler. eşleşen filtre herhangi bir rastgele darbe şekli için.
IIR dijital filtrelerin tasarımı, dinamik aralık sorunları gibi sorunlar nedeniyle genellikle daha zordur. niceleme gürültüsü Tipik olarak dijital IIR filtreleri bir dizi dijital biquad filtreleri.
Tüm düşük geçişli ikinci dereceden sürekli zaman filtrelerinde bir transfer işlevi veren

Tüm bant geçiren ikinci dereceden sürekli zaman filtreleri, aşağıdaki şekilde verilen bir transfer fonksiyonuna sahiptir:

nerede
- K kazançtır (düşük geçişli DC kazancı veya bant geçişli orta bant kazancı) (K pasif filtreler için 1'dir)
- Q ... Q faktörü
- merkez frekansı
- karmaşık frekans


Ayrıca bakınız
- Filtre tasarımı
- Laplace dönüşümü
- Green işlevi
- Prototip filtresi
- Z-dönüşümü
- Sistem teorisi
- Doğrusal olmayan filtre
- Wiener filtresi
- Gabor filtresi
- Leapfrog filtresi
Notlar ve referanslar
- ^ Bununla birlikte, FIR filtrelerinin, geri beslemesiz topolojileri ve analog gecikme elemanlarını içeren analog sinyalleri doğrudan işlediği birkaç durum vardır. Bir örnek, ayrık zamandır analog örneklenmiş filtre, sözde kullanılarak uygulanan kova tugay cihazı belirli bir örnekleme hızında saat hızına sahiptir, giriş sinyalinin kopyalarını farklı gecikmelerde çıkarır ve bu, bir FIR filtresini gerçekleştirmek için bir miktar ağırlıklandırma ile birleştirilebilir. Gibi elektromekanik filtreler SAW filtreleri aynı şekilde FIR filtre yanıtlarını uygulayabilir; bunlar sürekli zamanda çalışır ve bu nedenle daha yüksek frekanslar için tasarlanabilir.
- ^ Önemsiz durumların dışında, nedensel değillerse (ve bu nedenle gerçek zamanlı uygulamalarda kullanılamazlarsa) veya kararsız veya "marjinal olarak kararlı" olarak sınıflandırılan aktarım işlevlerini uyguluyorlarsa, sıfır faz yanıtlı kararlı IIR filtreleri mümkündür. çift entegratör.
- ^ A. Zverev, Filtre Sentezi El KitabıJohn Wiley and Sons, 1967, ISBN 0-471-98680-1
- ^ Normalde, hesaplama hassasiyetleri çok zahmetli bir işlemdir. Ancak bir empedansla sürülen ve bir dirençle sonlandırılan bir LC merdiveninin özel durumunda, hassasiyetlerin küçük olduğunu gösteren düzgün bir argüman vardır. Böyle bir durumda, maksimum frekanstaki iletim, kaynağın fiziği ve yük empedansları tarafından belirlendiği üzere, mümkün olan maksimum enerjiyi çıkış yüküne aktarır. Bu nokta maksimum olduğu için, herşey ile ilgili türevler herşey bileşen değerleri sıfır olmalıdır, çünkü değiştirmenin sonucu hiç bileşen değeri hiç yön yalnızca bir azalmaya neden olabilir. Bu sonuç yalnızca yanıtın zirvelerinde kesin olarak geçerlidir, ancak yakın noktalarda da kabaca doğrudur.
daha fazla okuma
- Williams, Arthur B & Taylor, Fred J (1995). Elektronik Filtre Tasarımı El Kitabı. McGraw-Hill. ISBN 0-07-070441-4.
- Ulusal Yarıiletken AN-779 analog filtre teorisini açıklayan uygulama notu
- Kafes AN6017 uygulama notu karşılaştırma ve zıt filtreler (sönümleme katsayısı sırasına göre, küçükten yükseğe değerlere): Gaussian, Bessel, lineer faz, Butterworth, Chebyshev, Legendre, eliptik. (grafiklerle).
- ANALOG CİHAZLARIN AKTİF FİLTRE TASARIM ARACININ KULLANILMASI: benzer bir uygulama notu Analog cihazlar kapsamlı grafikler, aktif RC filtre topolojileri ve pratik tasarım tabloları ile.
- "Analog Filtrelerin Tasarımı ve Analizi: Bir Sinyal İşleme Perspektifi" L.D. Paarmann tarafından