Paralel hareket - Parallel motion

paralel hareket bir mekanik bağlantı tarafından icat edildi İskoç mühendis James Watt 1784 yılında çift oyunculuk Watt buhar motoru. Çubuğa önemli ölçüde yanal yük getirmeden, bir yay içinde hareket eden bir kirişe hareketi iletmek için pratik olarak yukarı ve aşağı hareket eden bir çubuğa izin verir.
Açıklama

Önceki motorlarda Newcomen ve Watt, piston bir kullanarak güç darbesi sırasında yürüyen kirişin bir ucunu aşağı doğru çekti Zincir ve pompanın ağırlığı, ikinci bir zincir kullanarak kurtarma stroku sırasında kirişin diğer ucunu aşağı doğru çekti, değişen kuvvetler kirişin sallanma hareketini üretiyordu. Watt'ın yeni çift etkili motorunda, piston hem yukarı hem de aşağı vuruşlarda güç üretti, bu nedenle kuvveti kirişe iletmek için bir zincir kullanılamazdı. Watt, paralel hareketi, piston çubuğunu dikeye çok yakın tutarken, kuvveti her iki yönde iletecek şekilde tasarladı. Buna "paralel hareket" adını verdi çünkü hem pistonun hem de pompa çubuğunun birbirine paralel dikey olarak hareket etmesi gerekiyordu.

James Watt, tasarıma nasıl ulaştığını anlatan 1808'de oğluna yazdığı bir mektupta, "Paralel hareketle şimdiye kadar yaptığım diğer icatlardan daha gurur duyuyorum" diye yazmıştı.[1] Dahil ettiği taslak aslında şu anda Watt bağlantısı bu, Watt'ın 1784 patentinde açıklanan bir bağlantıydı, ancak paralel hareket hemen yerini aldı.[2]
Paralel hareket, tasarıma eklenmiş bir pantograf bağlantısına sahip olarak Watt'ın bağlantısından farklıydı. Bu, temel prensibi etkilemedi, ancak makine dairesinin daha küçük olmasına izin verdi çünkü bağlantı daha kompakttı.[2]
Newcomen motorunun pistonu atmosferik basınçla aşağı doğru itildi ve canlı buharla yükseltildi. Watt'ın cihazı, canlı buharın pistonun her iki tarafında doğrudan çalışma için kullanılmasına izin verdi, böylece gücü neredeyse iki katına çıkardı ve aynı zamanda gücü döngü boyunca daha eşit bir şekilde iletti; ileri geri hareketi dönme hareketine dönüştürürken bir avantaj (bir krank aracılığıyla olsun) veya aracılığıyla Güneş ve gezegen dişli sistemi).
Çalışma prensibi
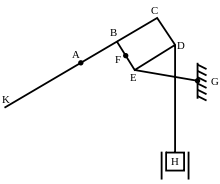
Sağdaki şemaya bakın. Bir yürüyen kirişin muylusu (yatağı) KACaşağı yukarı sallanan Bir. H dikey değil yatay olarak hareket etmesi gereken pistondur. Tasarımın kalbi, aşağıdakilerden oluşan dört çubuklu bağlantıdır AB, BE ve ÖRNEĞİN ve temel bağlantı AG, motor çerçevesindeki her iki eklem. Işın sallandıkça F (bu açıklamaya yardımcı olmak için çizilmiştir, ancak makinenin kendisinde işaretli bir nokta değildir) uzatılmış bir sekiz şeklini (daha doğrusu, bir Bernoulli lemniscate ) havada. Yürüyen kirişin hareketi küçük bir açıyla sınırlandırıldığından, F dikey düz bir çizgiye oldukça yakın olan sekiz şeklinin yalnızca kısa bir bölümünü açıklar. Sekiz rakamı kollar kadar simetriktir AB ve ÖRNEĞİN eşit uzunluktadır ve oranı BF -e FE ile eşleşir AB -e ÖRNEĞİN. Strok uzunluğu (yani, maksimum hareket F) dır-dir S, o zaman düz bölüm en uzundur BE yaklaşık 2/3 S ve AB 1.5 S.[3]
Bağlanmak mümkün olabilirdi F doğrudan piston çubuğuna ("Watt'ın bağlantısı" tasarımı), ancak bu, makineyi garip bir şekil haline getirebilirdi. G yürüyen kirişin sonundan uzun bir yol. Bundan kaçınmak için Watt, paralelkenar bağlantısını BCDE ekleyerek bir pantograf. Bu garanti eder F her zaman düz bir çizgide uzanır Bir ve Dve bu nedenle hareket D hareketinin büyütülmüş hali F. D bu nedenle piston çubuğunun DH eklendi. Pantografın eklenmesi de mekanizmayı kısalttı ve böylece motoru içeren bina daha küçük olabilirdi.
Daha önce belirtildiği gibi, yolu F mükemmel bir doğru değil, sadece bir yaklaşımdır. Watt'ın tasarımı düz bir çizgiden 4000'de yaklaşık bir parça sapma yarattı. Daha sonra, 19. yüzyılda, mükemmel düz hat bağlantıları icat edildi. Peaucellier-Lipkin bağlantısı 1864.
Ayrıca bakınız
- Watt bağlantısı
- Peaucellier-Lipkin bağlantısı
- Sarrus bağlantısı - üç boyutta tam paralel hareket
Referanslar
- ^ a b Franz Reuleaux, Makinelerin Kinematiği (1876), 4. sayfa.
- ^ a b Ferguson, Eugene S. (1962). Tarih ve Teknoloji Müzesi Katkıları: Kağıt 27 Watt Zamanından Mekanizmaların Kinematiği. Amerika Birleşik Devletleri Ulusal Müze Bülteni. 228. s. 185–230. Ayrıca şu adresten temin edilebilir: https://www.gutenberg.org/files/27106/27106-h/27106-h.htm
- ^ Neil Sclater ve Nicholas P. Chironis, Mekanizmalar ve Mekanik Cihazlar Kaynak Kitabı Üçüncü Baskı (2001), sayfa 136.
- Genel
- Bağlantılar Encyclopædia Britannica'daki makale, 1958.
- Paralel Hareket Encyclopædia Britannica'daki makale, 1911.
- Robert Stuart, Steam Motorunun Açıklayıcı Tarihçesi, Londra, J. Knight ve H. Lacey, 1824.
daha fazla okuma
- Çevreniz Ne Kadar Yuvarlak? (Bryant ve Sangwin, 2008) James Watt'ın paralel hareket mekanizması hakkında bir bölüm içerir