Gemi dengesi - Ship stability
Gemi dengesi alanı gemi mimarisi ve bir geminin, sağlam veya hasarlı olsun, hem durgun suda hem de dalgalarda denizde nasıl davrandığını ele alan gemi tasarımı. Kararlılık hesaplamaları şunlara odaklanır: ağırlık merkezleri, yüzdürme merkezleri, gemilerin metasentleri ve bunların nasıl etkileşime girdiği.
Tarih

Deniz mimarisiyle ilgili olduğu için gemi stabilitesi yüzlerce yıldır dikkate alınmıştır. Tarihsel olarak, gemi stabilite hesaplamaları dayanmaktadır temel kural Genellikle belirli bir ölçüm sistemine bağlı hesaplamalar. Bu çok eski denklemlerden bazıları bugün gemi mimarisi kitaplarında kullanılmaya devam ediyor. Bununla birlikte, kararlılığı belirleyen kalkülüs temelli yöntemlerin ortaya çıkışı, özellikle Pierre Bouguer'in metacenter kavramını 1740'larda tanıtması gemi modeli havzası, çok daha karmaşık analize izin verir.
Geçmişin usta gemi yapımcıları, uyarlanabilir ve değişken bir tasarım sistemi kullandılar. Gemiler genellikle bir nesilden diğerine yalnızca küçük değişikliklerle kopyalandı; Kararlı tasarımları çoğaltarak, genellikle ciddi sorunlardan kaçınıldı. Gemiler bugün hala bu adaptasyon ve varyasyon sürecini kullanıyor; ancak, hesaplamalı akışkanlar dinamiği, gemi modeli testi ve daha iyi genel bir anlayış sıvı ve gemi hareketleri çok daha analitik tasarıma izin verdi.
Enine ve boyuna su geçirmez bölmeler tanıtıldı sağlam 1860 ve 1880'ler arasındaki tasarımlar, çarpışma önleyici perdeler İngiliz buharında zorunlu hale getirildi Ticaret gemileri 1860 öncesi.[1] Bundan önce, bir geminin herhangi bir yerindeki bir gövde çatlağı tüm uzunluğu boyunca su basabilir. Enine perdeler, pahalı olsalar da, hasarsız olanlardan ayırdıkları açık bölmelere su baskınını sınırlandırarak, gövde hasarı durumunda geminin hayatta kalma olasılığını arttırır. Boyuna perdelerin de benzer bir amacı vardır, ancak aşırıyı ortadan kaldırmak için hasarlı stabilite etkileri hesaba katılmalıdır. topuk. Günümüzde çoğu geminin, iskele ve sancak bölümlerindeki suyu eşitlemek için araçları vardır (çapraz su baskını), bu da yapısal stresleri ve geminin topuk ve / veya trimindeki değişiklikleri sınırlamaya yardımcı olur.
Eklenti stabilite sistemleri
Ek stabilite sistemleri, dalgaların ve rüzgarların etkilerini azaltmak için tasarlanmıştır. Sakin denizlerde bir geminin dengesini artırmazlar. Uluslararası Denizcilik Kurumu Uluslararası Yükleme Hatları Sözleşmesi, stabilite sağlama yöntemi olarak aktif stabilite sistemlerinden bahsetmez. Gövde aktif sistemler olmadan stabil olmalıdır.
Pasif sistemler
Sintine salma

Bir sintine omurgası sintine dönüşünde gemi uzunluğu boyunca kaynaklanmış uzun, genellikle V şeklinde bir metal kanatçıktır. Sintine omurgaları çiftler halinde kullanılır (geminin her bir tarafı için bir tane). Nadiren, bir geminin her tarafında birden fazla sintine omurgası olabilir. Sintine omurgaları, bir gemi döndüğünde hidrodinamik direnci arttırır ve rulo miktarını sınırlar.
Destek ayakları
Destek ayakları Yüzer yüzerleri daldırmak için gerekli kuvvet veya hidrodinamik folyolar ile yuvarlanmayı azaltmak için teknelerde kullanılabilir. Bazı durumlarda, bu payandalar, gemiyi bir araç olarak sınıflandırmak için yeterli boyuttadır. Trimaran; diğer gemilerde, basitçe dengeleyiciler olarak adlandırılabilirler.
Antiroll tankları
Antiroll tankları iç tanklar şaşkınlıklar tankın iskele tarafından sancak tarafına su aktarım hızını yavaşlatmak için. Geminin yüksek tarafında daha büyük miktarda su hapsolacak şekilde tasarlanmıştır. Bunun tersine bir etkiye sahip olması amaçlanmıştır. serbest yüzey etkisi.
Paravanlar
Paravanlar balıkçı tekneleri gibi yavaş hareket eden gemiler tarafından yalpalanmayı azaltmak için kullanılabilir.
Aktif sistemler
Birçok gemide bulunan aktif stabilite sistemleri, sisteme pompalar, hidrolik pistonlar veya elektrikli aktüatörler şeklinde enerji uygulanmasını gerektirir. Geminin hareketini engellemek için içine sıvının pompalandığı tankların veya tankların yan tarafına tutturulmuş dengeleyici kanatçıklar içerirler.
Sabitleyici kanatçıklar
Aktif kanat stabilizatörleri Bir teknenin seyir halindeyken veya daha yakın zamanda dinlenirken yaşadığı dönüşü azaltın. Su hattının altında geminin gövdesinin ötesine uzanırlar ve uçağa benzer şekilde çalışarak topuk açısına ve geminin dönüş hızına bağlı olarak hücum açısını değiştirirler. kanatçıklar. Yolcu gemileri ve yatlar sık sık bu tür dengeleme sistemini kullanın.
Kanatlar geri çekilebilir olmadığında, gövdeye sabit uzantılar oluştururlar, muhtemelen kirişi veya çekme zarfı uzatır ve ilave gövde açıklığı için dikkat gerektirir.
Tipik "aktif kanatçık" dengeleyici, seyir halindeki gemiler için yalpalamaya etkili bir şekilde karşı koyarken, bazı modern aktif kanat sistemleri, gemiler seyir halinde değilken yalpayı azaltabilir. Sıfır hız veya Hareketsizlikte Stabilizasyon olarak anılan bu sistemler, etkili devrilme iptali enerjisi oluşturmak için özel olarak tasarlanmış kanatları yeterli hızlanma ve darbe zamanlaması ile hareket ettirerek çalışır.
Dümen Rulo Stabilizasyonu
Bir geminin seyir halinde olması durumunda, hızlı bir dümen değişimi yalnızca bir rota değişikliğini başlatmaz, aynı zamanda geminin yuvarlanmasına da neden olur. Fırkateynler gibi bazı gemiler için, bu etki o kadar büyüktür ki, bir kontrol algoritması tarafından geminin yuvarlanma hareketlerini azaltırken aynı anda yönlendirmek için kullanılabilir. Böyle bir sistem genellikle "Dümen Rulo Stabilizasyon Sistemi ". Etkinliği, dengeleyici kanatçıklarınki kadar iyi olabilir. Bununla birlikte, bu, gemi hızına (ne kadar yüksek olursa o kadar iyidir) ve dümen konumlandırma sisteminin konumu, boyutu ve kalitesi gibi çeşitli gemi tasarım özelliklerine bağlıdır (bir kadar hızlı davranır. Ayrıca önemli olan, geminin dümen hareketlerine yalpalama hareketleri (hızlı daha iyidir) ve dönüş hızı (yavaş daha iyidir) ile ne kadar hızlı tepki vereceğidir.Yüksek kaliteli dümen donanımının yüksek maliyetlerine ve geminin kıç tarafının güçlendirilmesine rağmen Bu stabilizasyon seçeneği, dengeleyici kanatçıklardan daha iyi ekonomi sunar.Daha az kurulum gerektirir, daha az savunmasızdır ve daha az sürtünmeye neden olur. Sualtı gürültüsünün önemli ölçüde azaltılması Bu stabilizasyon çözümüne sahip bilinen donanma gemileri F124 (Almanya), M-fregat ve LCF'dir (her ikisi de Hollanda Donanması).
Jiroskopik iç stabilizatörler
Jiroskoplar ilk olarak 1920'lerin sonlarında ve 1930'ların başında savaş gemileri ve ardından yolcu gemileri için bir geminin yuvarlanmasını kontrol etmek için kullanıldı. Bir geminin dönüşünü kontrol etmek için büyük jiroskopların en iddialı kullanımı, İtalyan yolcu gemisi, SS Conte di Savoia üç büyük Sperry jiroskoplar geminin ön kısmına monte edildi. Batıya giden yolculuklarda yuvarlanmayı büyük ölçüde azaltmada başarılı olmuş olsa da, güvenlik nedenlerinden ötürü sistemin doğuya giden ayağında bağlantısının kesilmesi gerekiyordu. Bunun nedeni, takip eden denizde (ve bunun yarattığı derin yavaş dönüşlerde), sistem açıkken geminin "takılma" eğiliminde olması ve oluşturduğu ataletin, geminin ağır yuvarlanmalardan kendisini düzeltmesini zorlaştırmasıydı. [2]
Gyro stabilizatörleri eğirme işleminden oluşur volan ve jiroskopik devinim tekneyi düzelten tork gövde yapısı üzerinde. açısal momentum jiroskopun volanının bir ölçüsü, harici bir tork tarafından harekete geçmediği sürece volanın kendi ekseni etrafında dönmeye ne kadar devam edeceğinin bir ölçüsüdür. Açısal momentum ne kadar yüksekse, jiroskopun dış torka direnç kuvveti o kadar büyük olur (bu durumda teknenin yalpalamasını iptal etme yeteneği daha fazladır).
Bir jiroskopun üç ekseni vardır: bir dönme ekseni, bir giriş ekseni ve bir çıkış ekseni. Dönme ekseni, volanın etrafında döndüğü ve bir tekne jiroskopu için dikey olan eksendir. Giriş ekseni, giriş torklarının uygulandığı eksendir. Bir tekne için, ana giriş ekseni teknenin boylamasına eksenidir, çünkü bu, teknenin etrafında döndüğü eksendir. Ana çıkış ekseni, jiroskopun bir girdiye tepki olarak etrafında döndüğü veya hareket ettiği enine (enine) eksendir.
Tekne döndüğünde, dönüş, jiroskopa bir girdi olarak hareket eder ve jiroskopun kendi çıkış ekseni etrafında dönüş oluşturmasına neden olur, böylece dönüş ekseni kendisini giriş ekseniyle hizalamak için döner. Bu çıktı dönüşüne devinim ve tekne durumunda, jiroskop çıkış veya yalpa çemberi ekseni etrafında ileri ve geri dönecektir.
Açısal momentum, bir jiroskop dengeleyicinin etkinliğinin ölçüsüdür ve bir dizel motordaki beygir gücü değerlerine veya bir jeneratördeki kilovatlara benzer. Cayro stabilizatör spesifikasyonlarında, toplam açısal momentum (eylemsizlik momenti sıkma hızı ile çarpılır) anahtar miktardır. Modern tasarımlarda, çıkış ekseni torku, sadece küçük bir jiroskopa ihtiyaç duyulacak şekilde teknenin yalpalamasını engellemek için dengeleyici kanatçıkların (yukarıya bakın) açısını kontrol etmek için kullanılabilir. Bir geminin kanat dengeleyicilerini kontrol eden cayro fikri ilk olarak 1932'de bir Genel elektrik bilim adamı, Dr Alexanderson. Dengeleyici kanatçıklar üzerindeki elektrik motorlarına giden akımı kontrol etmek için bir jiroskop önerdi ve çalıştırma talimatları tarafından üretildi. tratron vakum tüpleri.[3]
Hesaplanan stabilite koşulları
Bir gövde tasarlandığında, stabilite hesaplamaları geminin sağlam ve hasarlı durumları için yapılır. Gemiler genellikle stabilite gereksinimlerini (aşağıda) biraz aşacak şekilde tasarlanır, çünkü genellikle bunun için bir toplum sınıflandırılması.
Sağlam stabilite
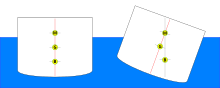
Bozulmamış stabilite hesaplamaları nispeten basittir ve daha sonra geminin ağırlık merkezini ve gövdenin kaldırma kuvvetini belirlemek için hesaplanan / hesaplanan nesnelerin tüm kütle merkezlerinin alınmasını içerir. Kargo düzenlemeleri ve yüklemeleri, vinç operasyonları ve tasarım deniz durumları genellikle dikkate alınır. Sağdaki diyagram, ağırlık merkezinin kaldırma kuvvetinin oldukça üzerinde olduğunu, ancak geminin sabit kaldığını göstermektedir. Gemi stabildir çünkü yatmaya başladığında gövdenin bir tarafı sudan yükselmeye başlar ve diğer tarafı batmaya başlar. Bu, kaldırma kuvvetinin merkezinin suda daha alçak olan tarafa doğru kaymasına neden olur. Donanma mimarının görevi, kaldırma kuvveti merkezinin, gemi topuklarken ağırlık merkezinin dışına kaymasını sağlamaktır. Hafifçe eğimli bir durumda dikey olarak kaldırma kuvvetinin merkezinden çizilen bir çizgi, merkez çizgisini metacenter adı verilen bir noktada kesecektir. Metacenter, omurgadan ağırlık merkezinden daha yukarıda olduğu sürece, gemi dik durumda stabildir.
Hasar stabilitesi (Hasarlı durumda stabilite)
Hasar stabilitesi hesaplamaları, sağlam stabiliteden çok daha karmaşıktır. Alanlar ve hacimler hızla yorucu hale gelebildiğinden ve diğer yöntemler kullanılarak hesaplanması uzun olabileceğinden, sayısal yöntemler kullanan yazılımlar genellikle kullanılır.
Su baskınından kaynaklanan stabilite kaybı kısmen serbest yüzey etkisinden kaynaklanıyor olabilir. Teknede biriken su genellikle sintinelere akar, ağırlık merkezini alçaltır ve fiilen azalır (Su GM artırılarak oraya taban ağırlık olarak ekleneceğinden artan olarak okunmalıdır) metasentrik yükseklik. Bu, geminin sabit ve dik kaldığını varsayar. Bununla birlikte, gemi herhangi bir dereceye kadar eğildiğinde (örneğin bir dalga ona çarptığında), sintinedeki sıvı alçak tarafa hareket eder. Bu bir liste.
Örneğin boş bir tank deniz suyu ile doldurulduğunda su baskınında stabilite de kaybolur. Tankın kaybolan kaldırma kuvveti, geminin bu bölümünün suya hafifçe alçalmasına neden olur. Bu, tank geminin merkez hattında olmadığı sürece bir liste oluşturur.
Stabilite hesaplamalarında, bir tank doldurulduğunda, içeriğinin kaybolduğu ve deniz suyuyla değiştirildiği varsayılır. Bu içerikler deniz suyundan daha hafifse (örneğin hafif yağ), kaldırma kuvveti kaybolur ve bölüm buna göre suda hafifçe alçalır.
Ticari gemiler için ve giderek artan bir şekilde yolcu gemileri için, hasar stabilitesi hesaplamaları olasılık niteliğindedir. Yani, gemiyi bir kompartıman arızası için değerlendirmek yerine, iki veya hatta en fazla üç kompartımanın su basması durumu da değerlendirilecektir. Bu, bir bölmenin hasar görme olasılığının geminin sonuçlarıyla birleştirildiği ve belirli düzenlemelere uymak zorunda olan bir hasar stabilite indeksi numarasıyla sonuçlanan bir kavramdır.
Gerekli kararlılık
Kabul edilebilir olması için sınıflandırma toplulukları benzeri Bureau Veritas, Amerikan Denizcilik Bürosu, Lloyd's Register of Ships, Kore Nakliye Sicili ve Det Norske Veritas, geminin planları, klas kuruluşu tarafından bağımsız olarak incelenmek üzere sağlanmalıdır. Ayrıca, geminin bayrağını almak istediği ülke için yönetmeliklerde belirtilen yapıyı izleyen hesaplamalar da sağlanmalıdır.
Bu çerçevede, farklı ülkeler karşılanması gereken gereksinimleri belirler. ABD bayraklı gemiler için, planlar ve denge hesaplamaları ABD Federal Düzenlemeler Yasasına göre kontrol edilir ve Denizde Can Güvenliği Uluslararası Sözleşmesi sözleşmeler (SOLAS). Gemilerin, tasarlandıkları koşullarda, hem hasarsız hem de hasarlı hallerde stabil olmaları gerekir. Tasarım için gerekli hasarın boyutu yönetmeliklere dahil edilmiştir. Varsayılan delik, geminin uzunluğunun ve genişliğinin kesirleri olarak hesaplanır ve gemi dengesine en fazla zararı vereceği gemi alanına yerleştirilecektir.
Ek olarak, Amerika Birleşik Devletleri Sahil Güvenlik kurallar ABD limanlarında ve ABD sularında çalışan gemiler için geçerlidir. Genel olarak bu Sahil Güvenlik kuralları, minimum metasentrik yükseklik veya minimum doğrulma momentiyle ilgilidir. Farklı ülkeler, minimum metasentrik yükseklik için farklı gereksinimlere sahip olabileceğinden, çoğu gemi artık bu mesafeyi kargo veya mürettebat yüklemesine göre anında hesaplayan denge bilgisayarlarıyla donatılmıştır. Bu görev için kullanılan ticari olarak temin edilebilen birçok bilgisayar programı vardır.
Ayrıca bakınız
- Serbest yüzey etkisi - Boş tanklarda sıvıların etkisi
- Devam etmiyorken stabilizasyon
- Meryem Gül - İngiliz Tudor donanmasının karakol tipi savaş gemisi
- Kronan (gemi) - 1670'lerde Baltık Denizi'ndeki İsveç Donanması'nın amiral gemisi
- SS Eastland - 1915'te Chicago'da devrilen yolcu gemisi
- Niobe (yelkenli)
- Pamir (gemi) - Alman yelkenli gemi
- Eğim testi
- Gemi hareketleri - 6 derecelik hareket serbestliğine bağlı terimler
Referanslar
- Başlık 46 ABD Federal Düzenlemeler Kanunu
- Çelik Gemilerin İnşası ve Sınıflandırılması için ABS Kuralları 2007
- Birkaç yaygın Yuvarlanma Zayıflatma Stratejisine Genel Bakış
- ^ Savaşçıdan Korkusuz'a D.K. Brown, Chatham Publishing (Haziran 1997)
- ^ "Dalgalara Meydan Okumak İçin İtalyan Gemisi" Popüler Mekanik, Nisan 1931
- ^ "Büyük Gömlekler İçin Yuvarlanmayı Önlemek İçin Amaçlanan Yüzgeçler" Popüler Mekanik, Ağustos 1932